Robust Wrapped Gaussian Process Inference for Noisy Angular Data
Part 1: RFID technology
- Technology researched in early 1970’s at Los Alamos National Laboratory.
- There has since been widespread adoption of RFID.
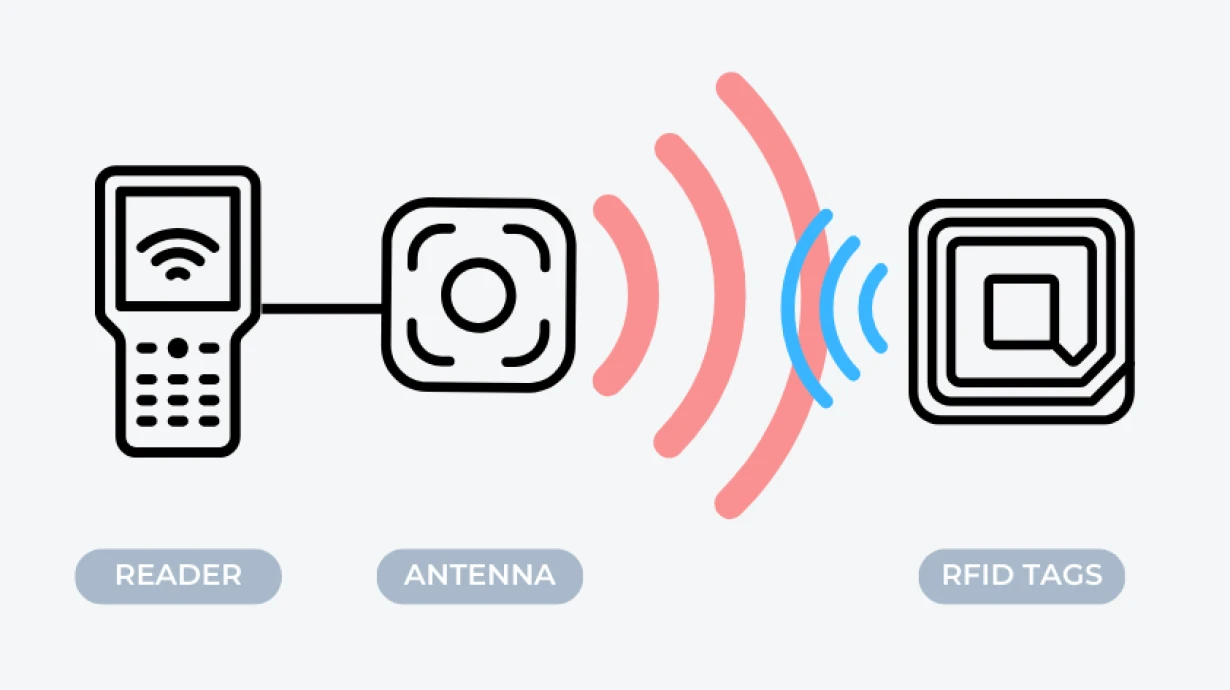
- Signals from antennae communicate with “passive” RFID tags attached to objects of interest.

Tracking nuclear materials with RFID
- Passive RFID tags are placed on containers and tracked with fixed antennae.
- RFID tells you whether an asset is in the laboratory.
- What researchers really want to know is where that asset is.
- Knowing the approximate location of tags would significantly save time searching for materials of interest.


Localizing RFID tags
RFID does not directly share location information, but we can infer location based on available communication data.
Previous attempts to localize RFID tags leverage the received signal strength indicator (RSSI).
- RSSI has been shown to be an unreliable metric for localization in indoor environments (Chandrasekaran et al. 2009).
- Multipath propagation causes signals to inferfere with each other and create noise.

RFID phase angle
- Communication between an antenna and a RFID tag elicits a phase angle.
- Phase will change when we change either…
- the signal’s frequency,
- or the distance between the tag and the antenna.
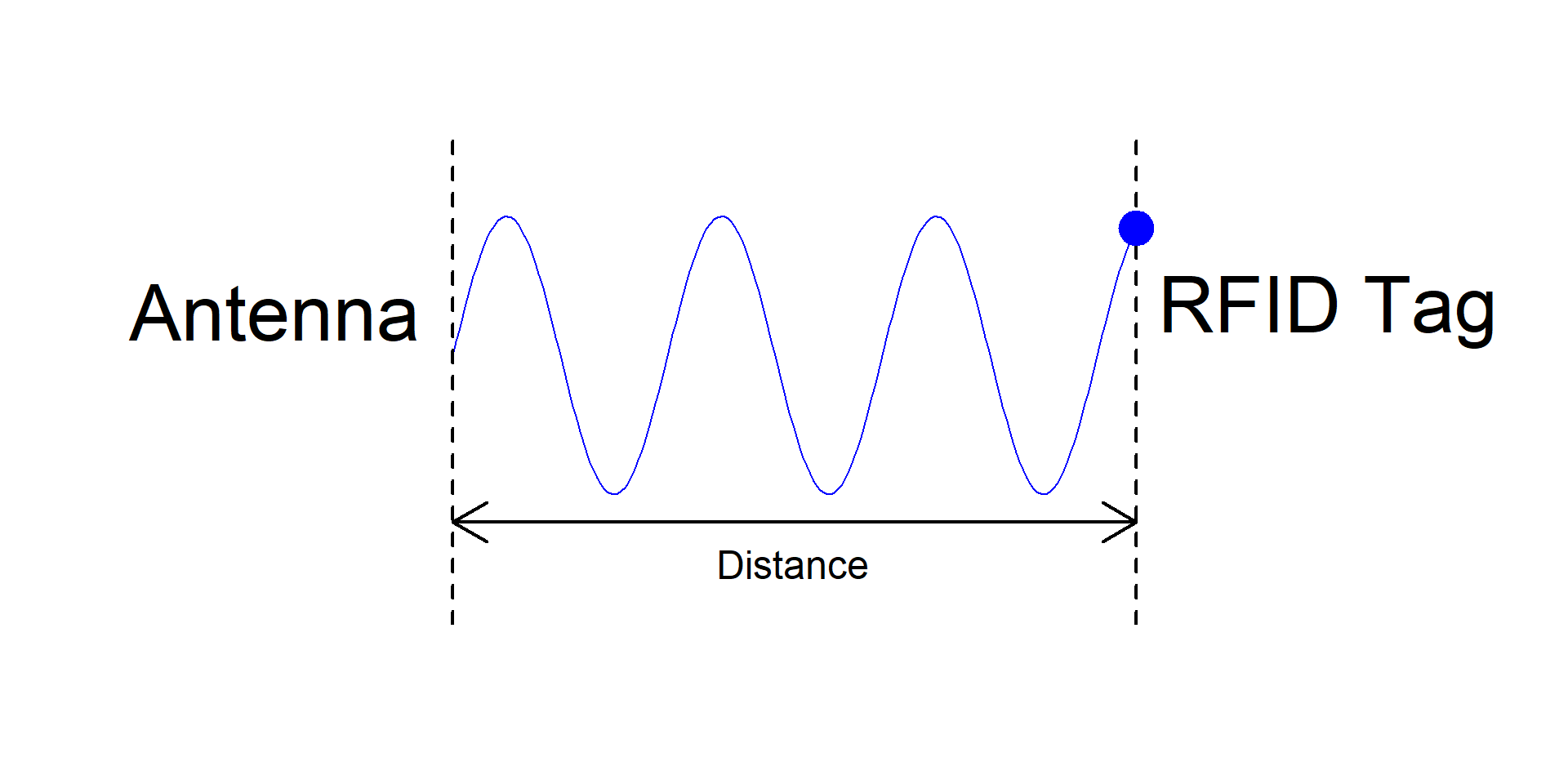
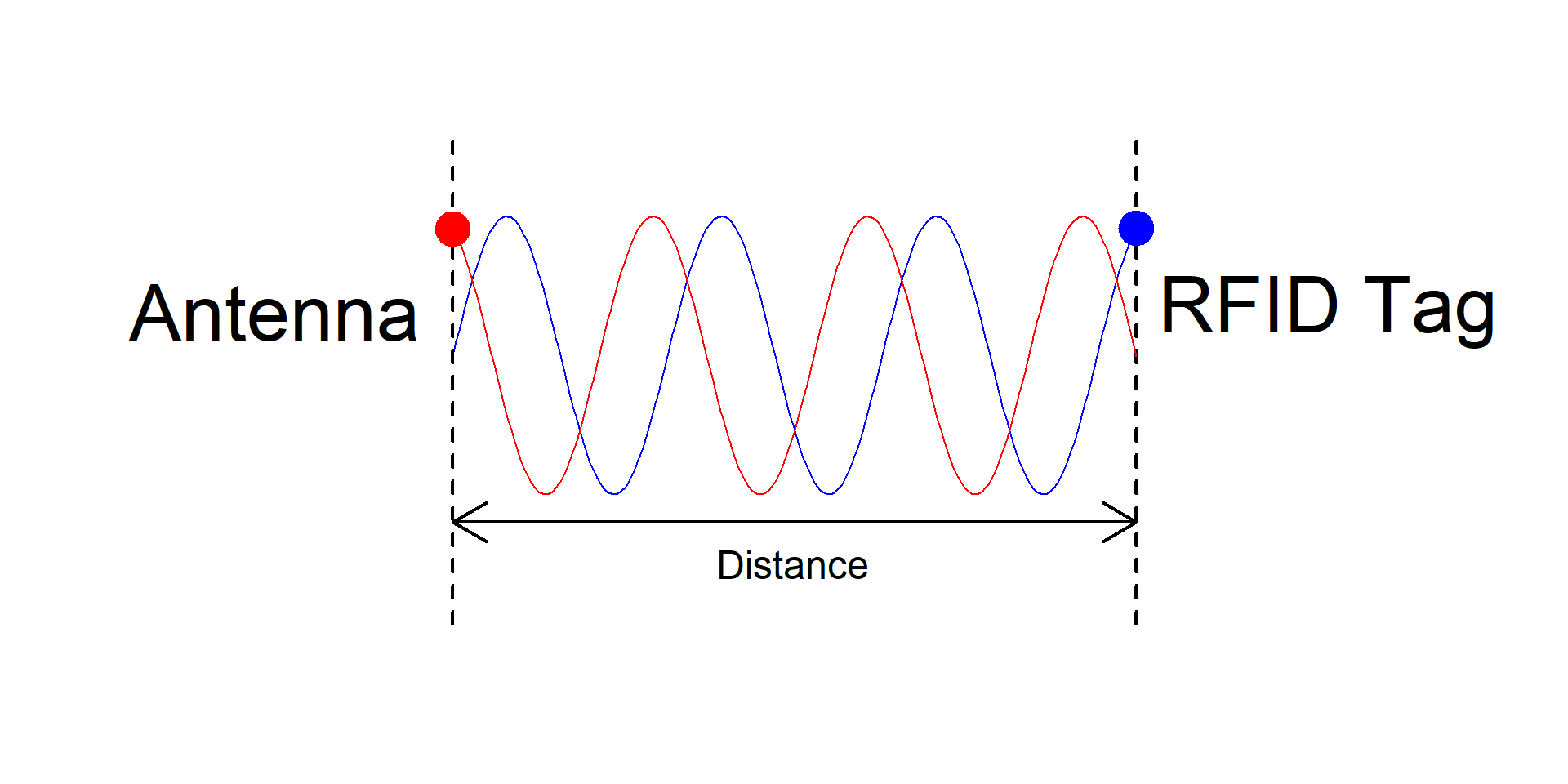
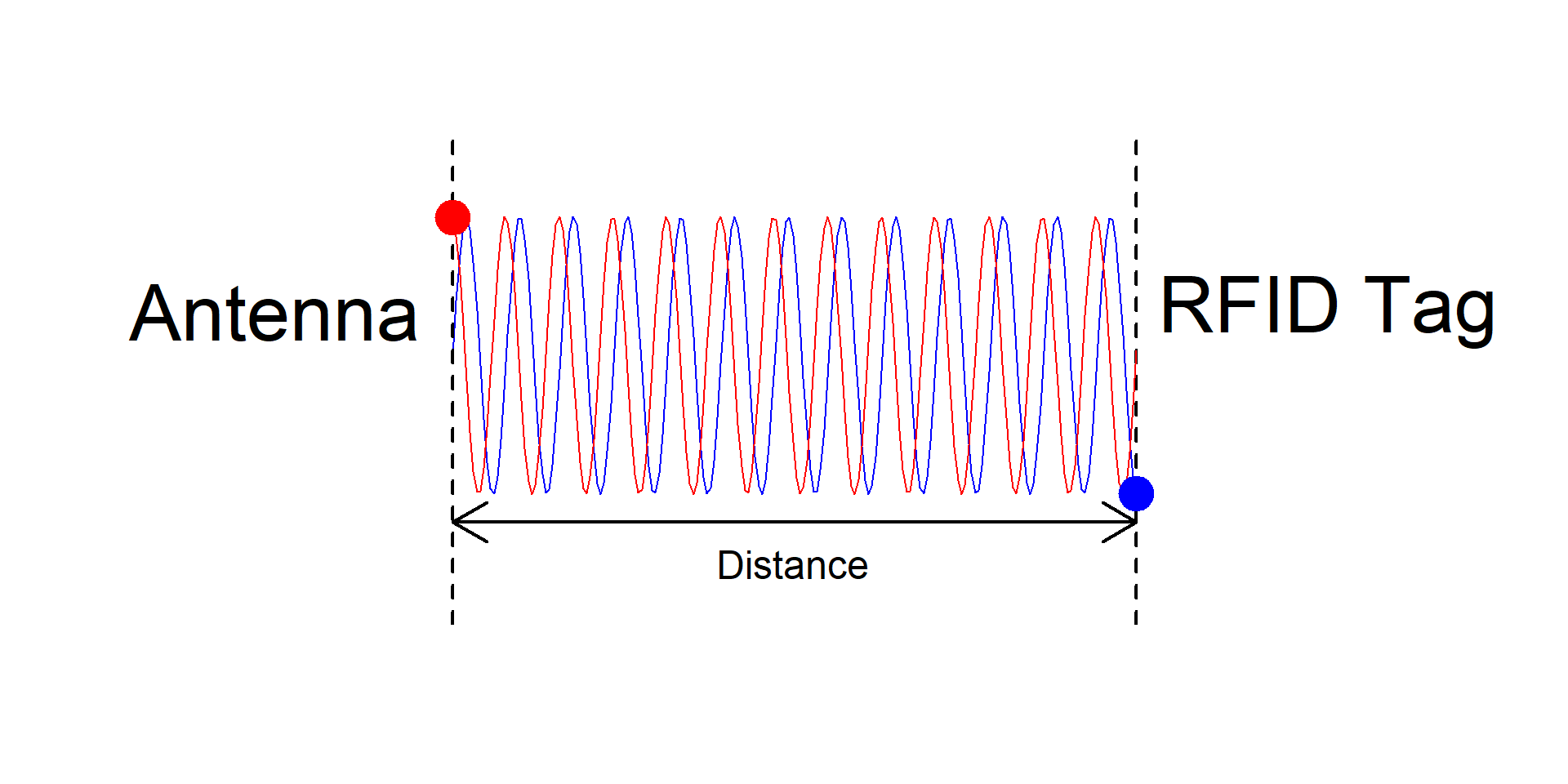
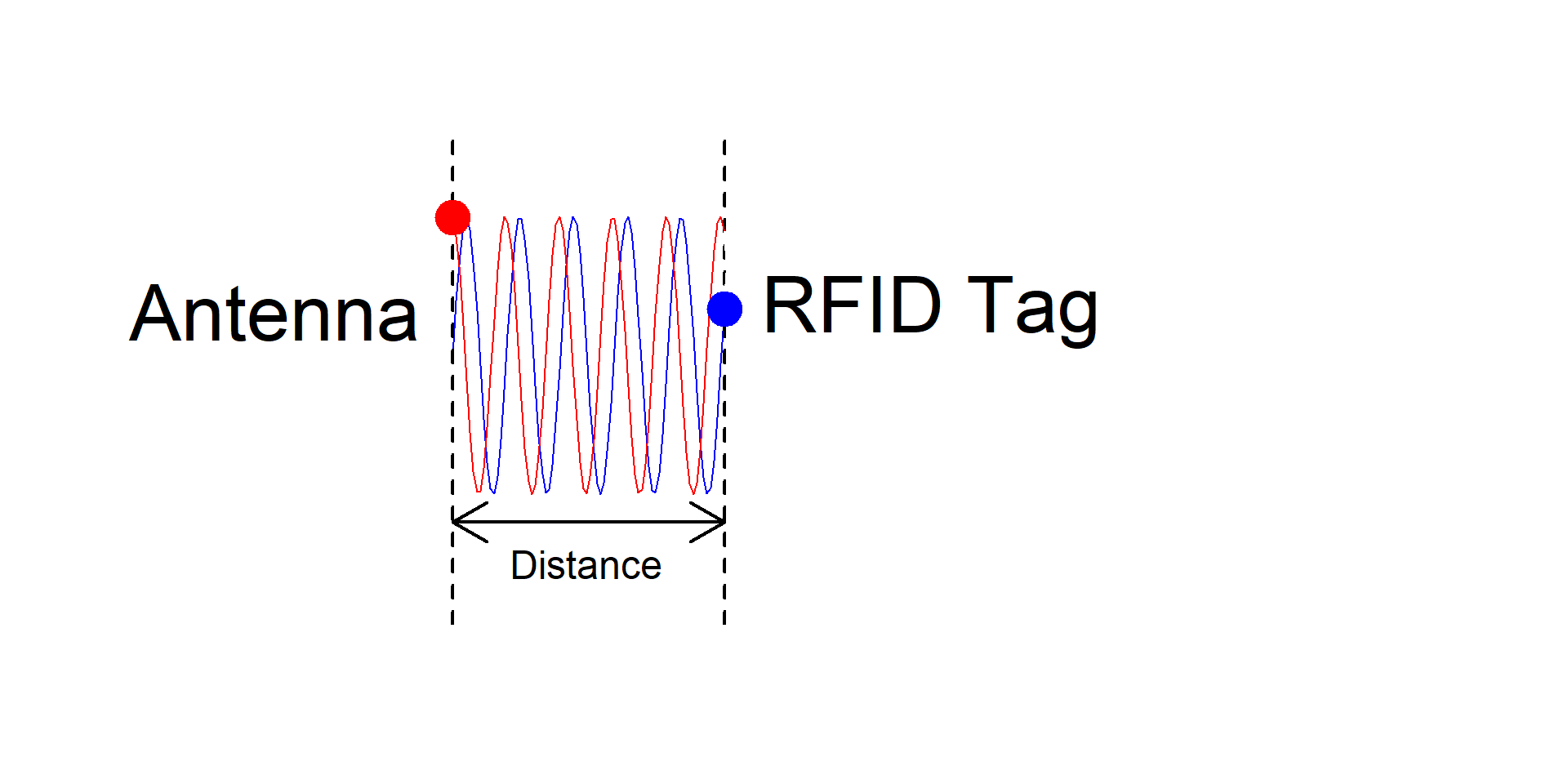
- There is a know relationship between frequency \(f\), phase angle \(\phi\), and distance \(d\):
\[\begin{align*} d &= \dfrac{c}{4\pi}\dfrac{\partial \phi}{\partial f}. \end{align*}\]
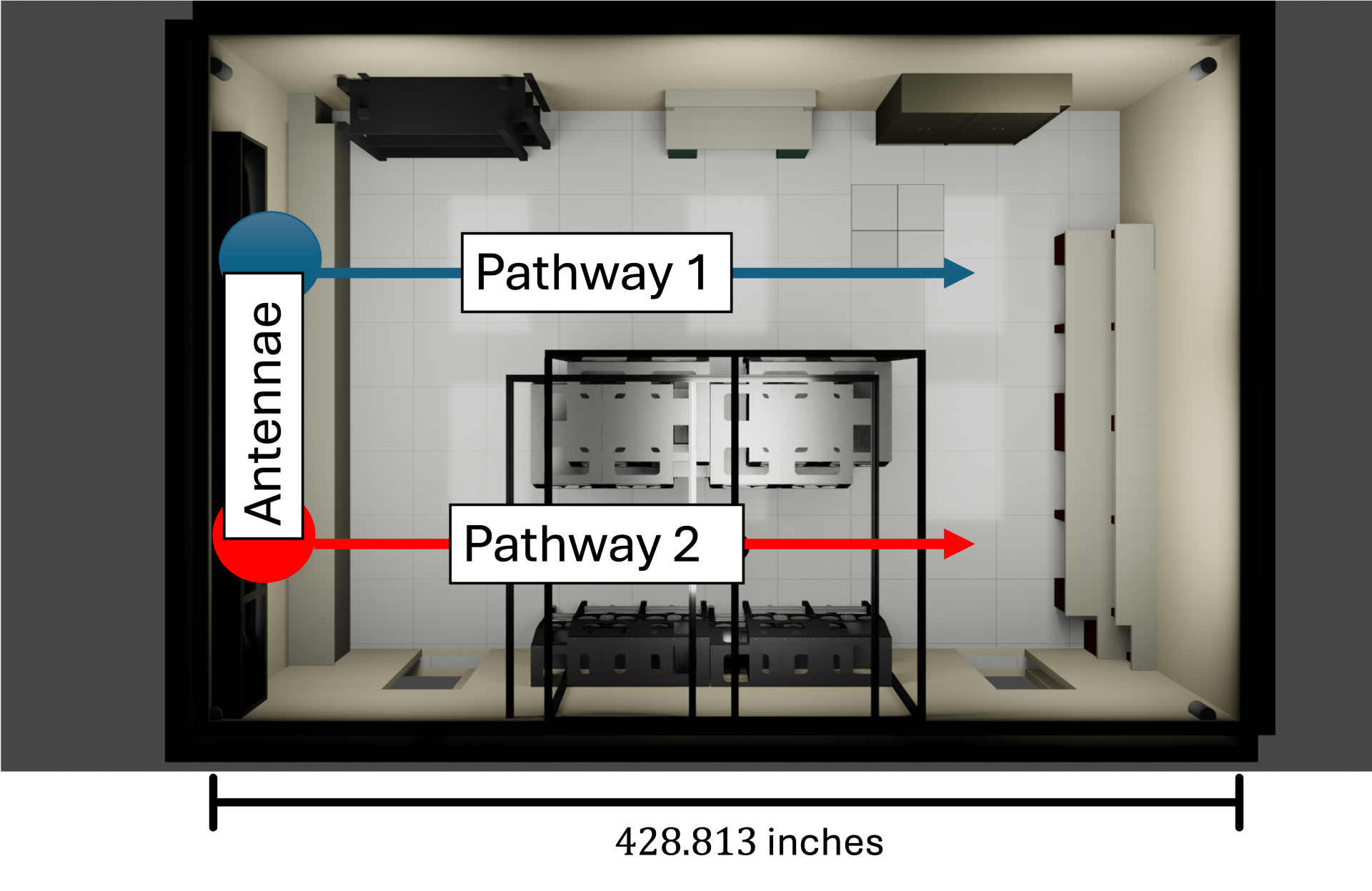
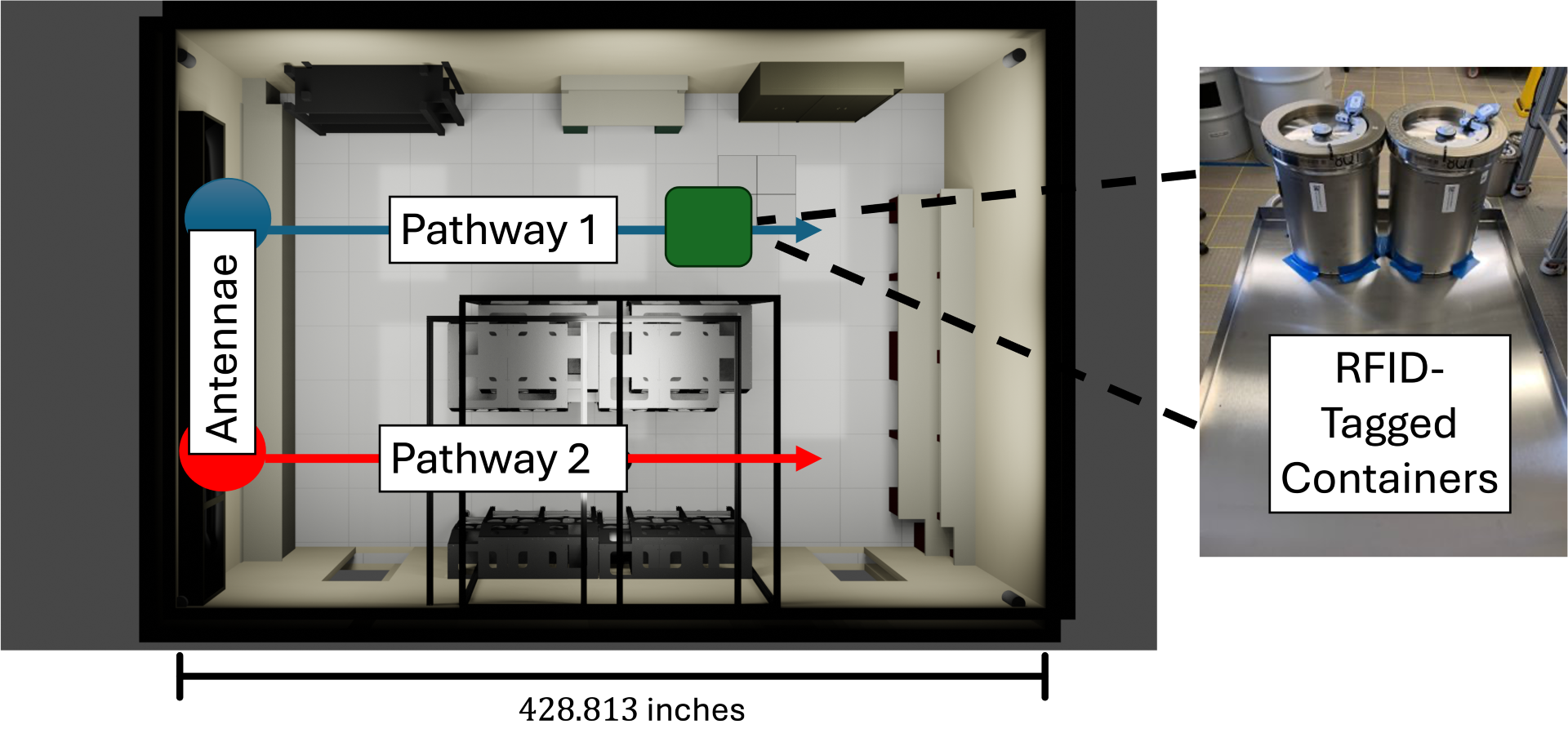
Part 2: RFID experiment setup
- Phase-frequency relationship of RFID signals studied in a “mock” lab environment.
- Static antennae aligned with two pathways in lab.
- Cart with RFID-tagged containers moved up and down pathways.

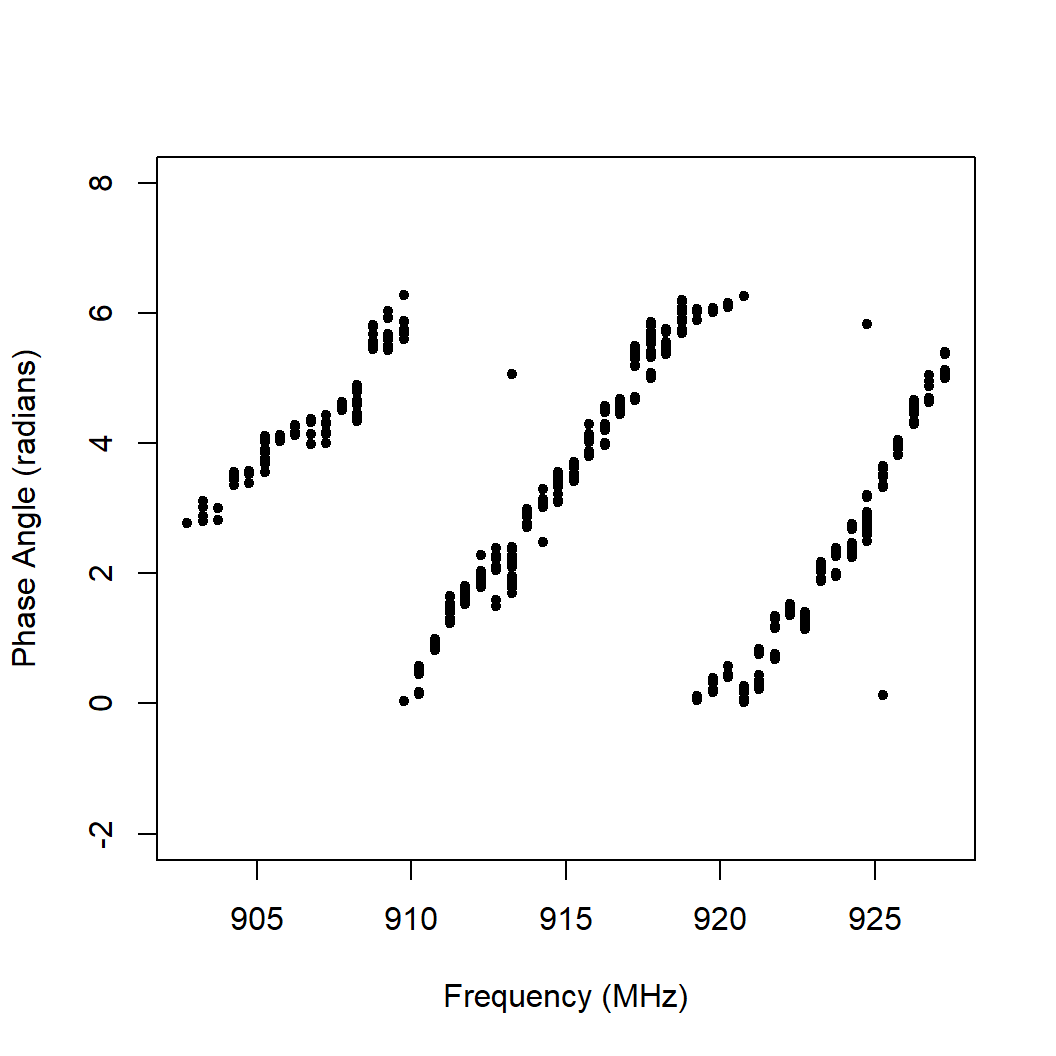
RFID experiment data
We employed a random design of \(22\) distances to collect phase angles.
Antennae cycled through \(50\) frequencies between \(902.75\)-\(927.25\) MHz for two minutes.
Part 3: Modeling phase-frequency
- Gaussian processes (GPs) assume a priori \(\phi\mid f \sim \mathcal{N}(\alpha + \beta f, \tau^2\Sigma(f))\).
- Allows for flexible, non-linear modeling.
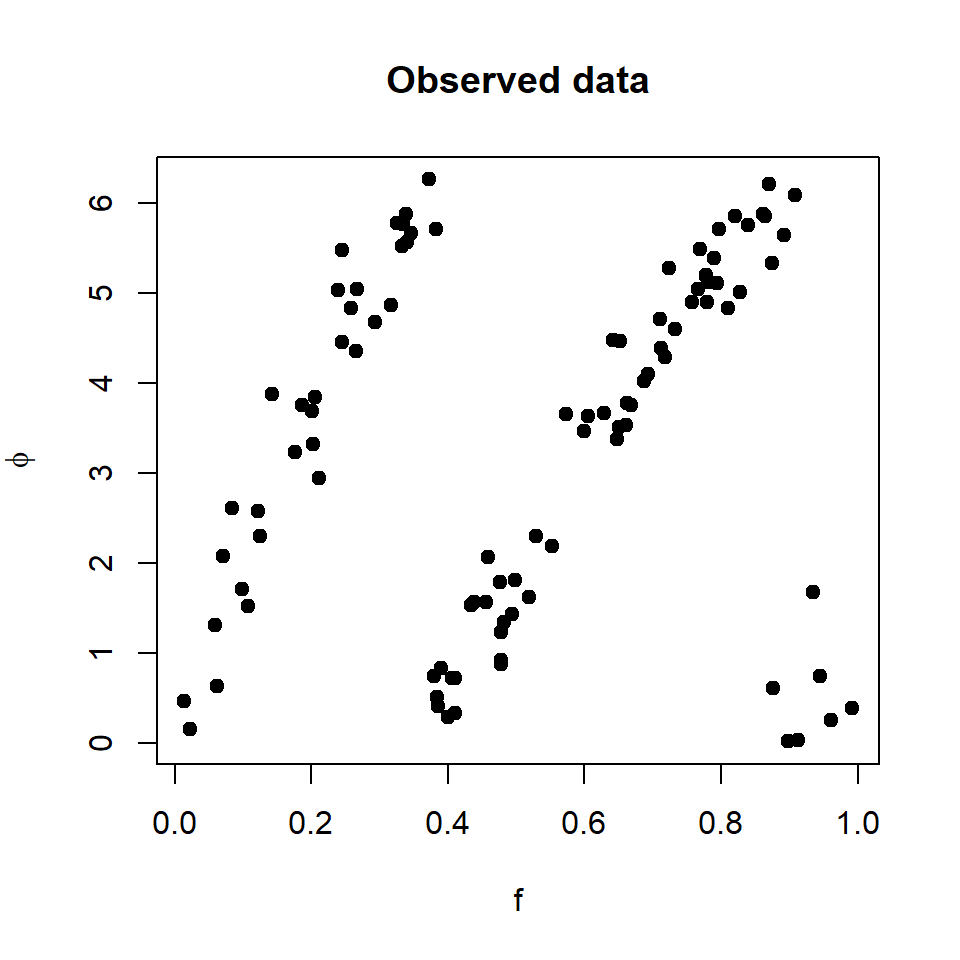
- An ordinary GP struggles to capture phase-frequency behavior.
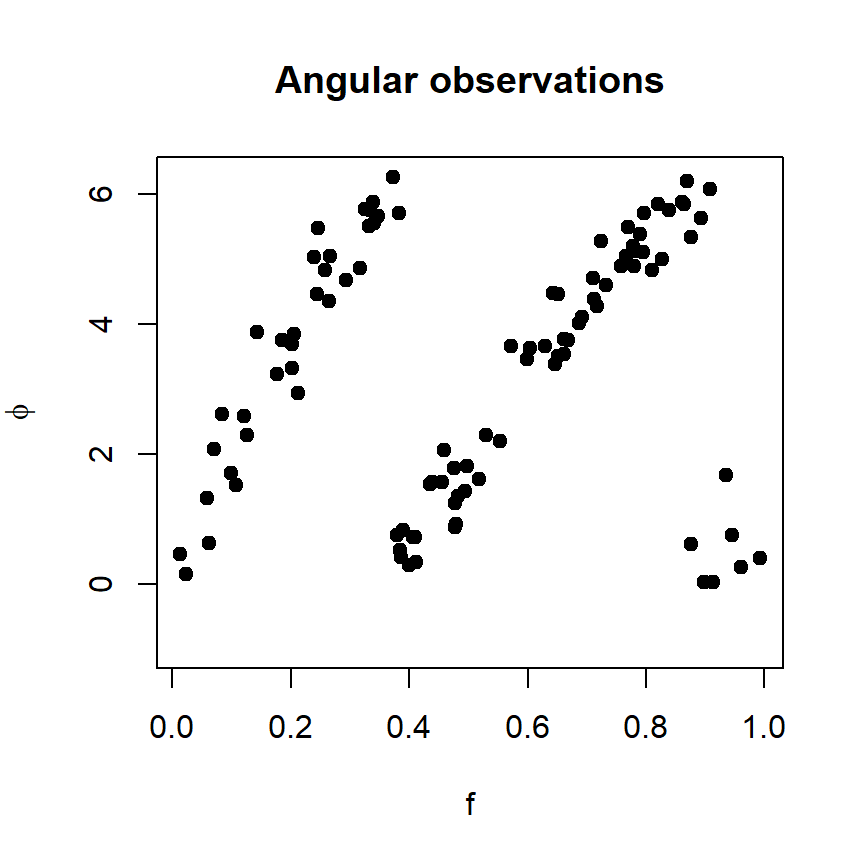
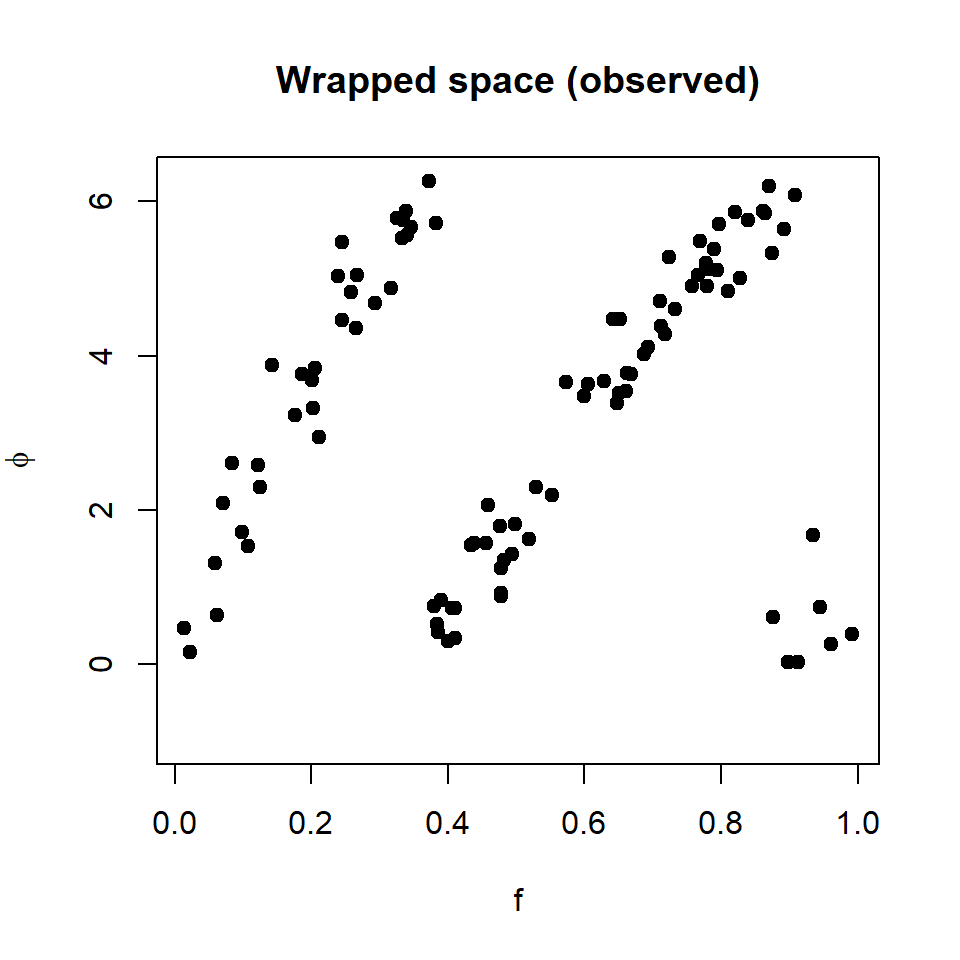
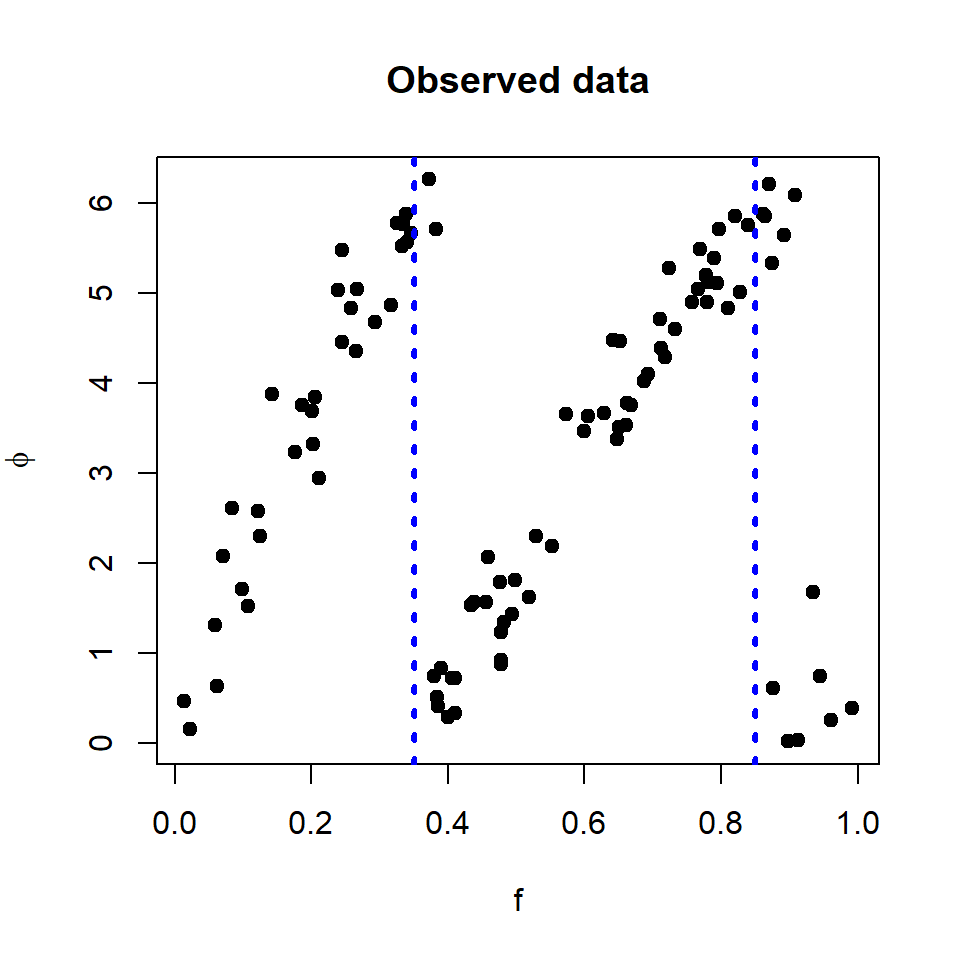
Modeling an angular response
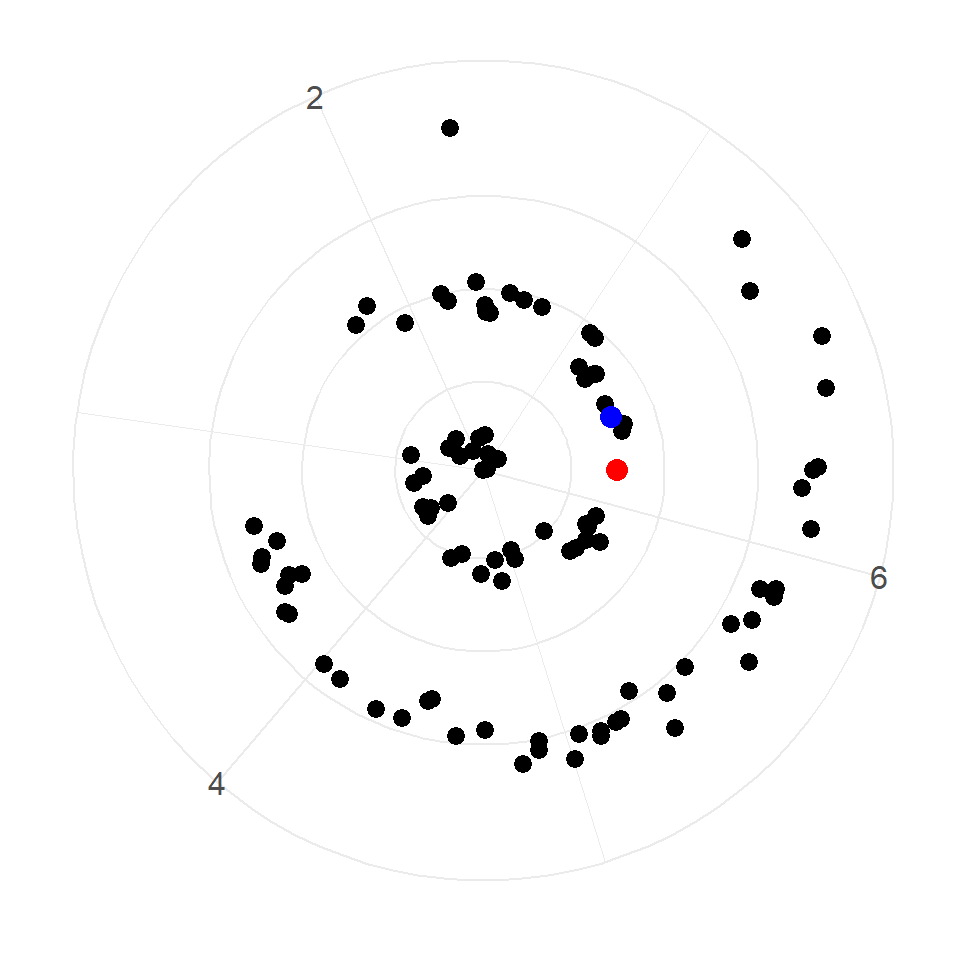
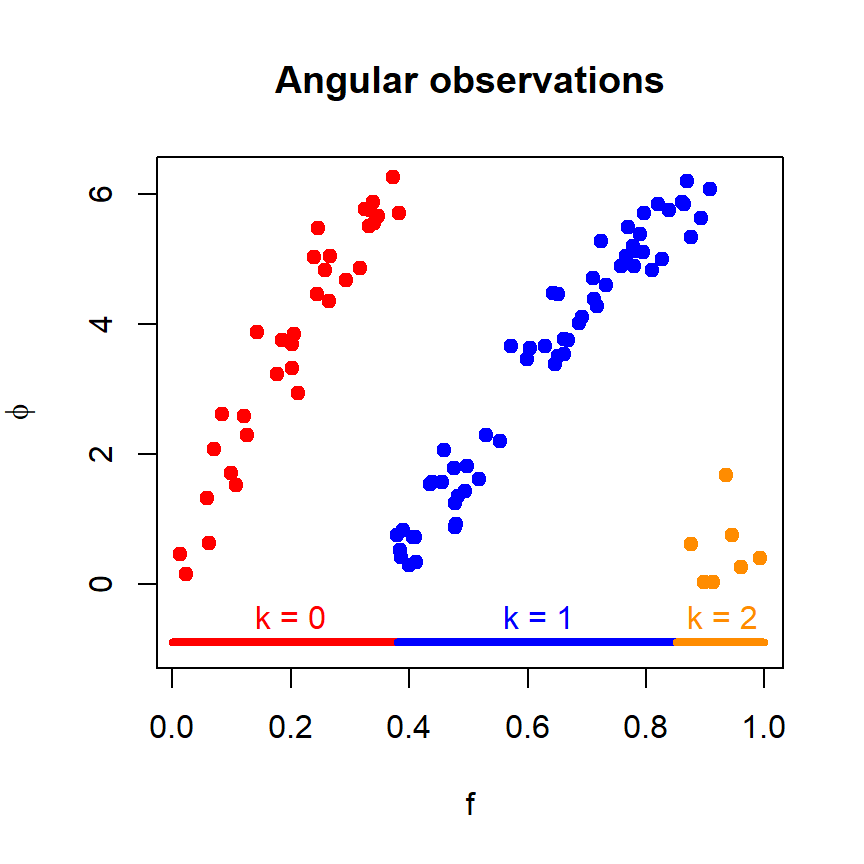
- Angular responses \(\phi\in[0,2\pi)^n\) lie in circular space.
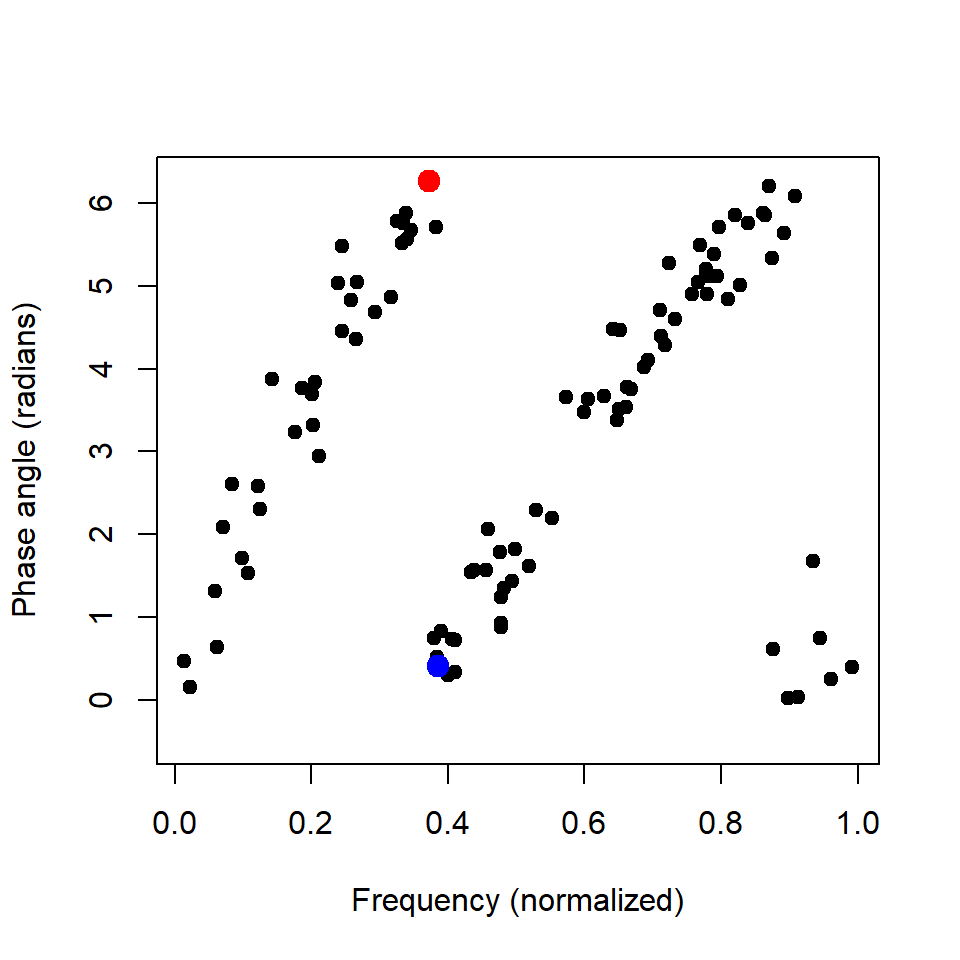
Wrapped modeling approach
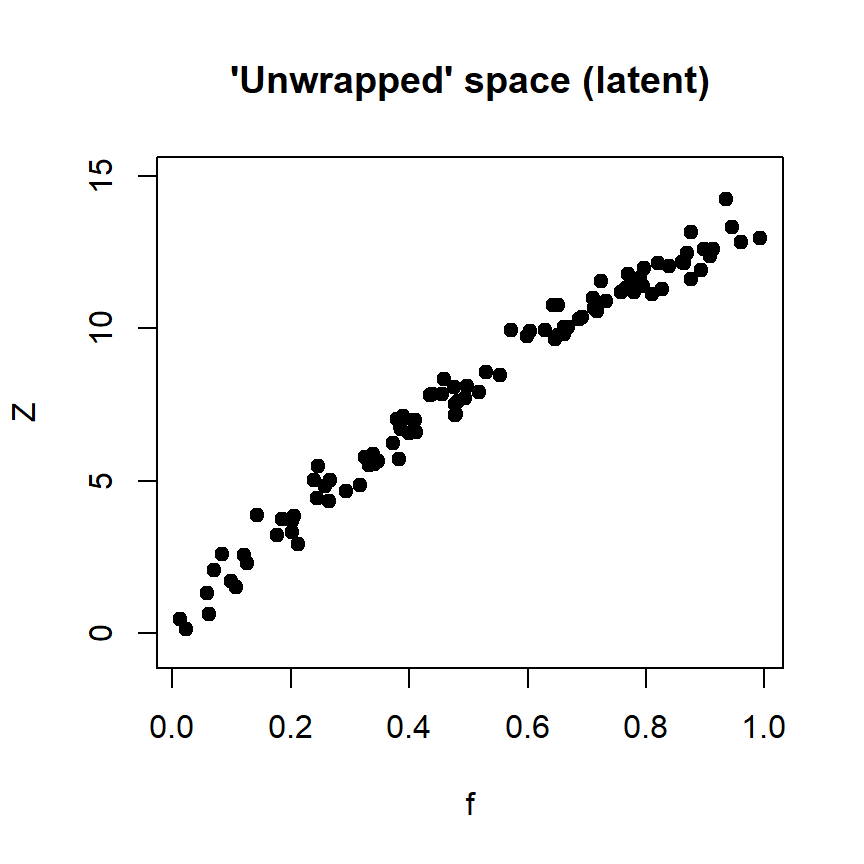
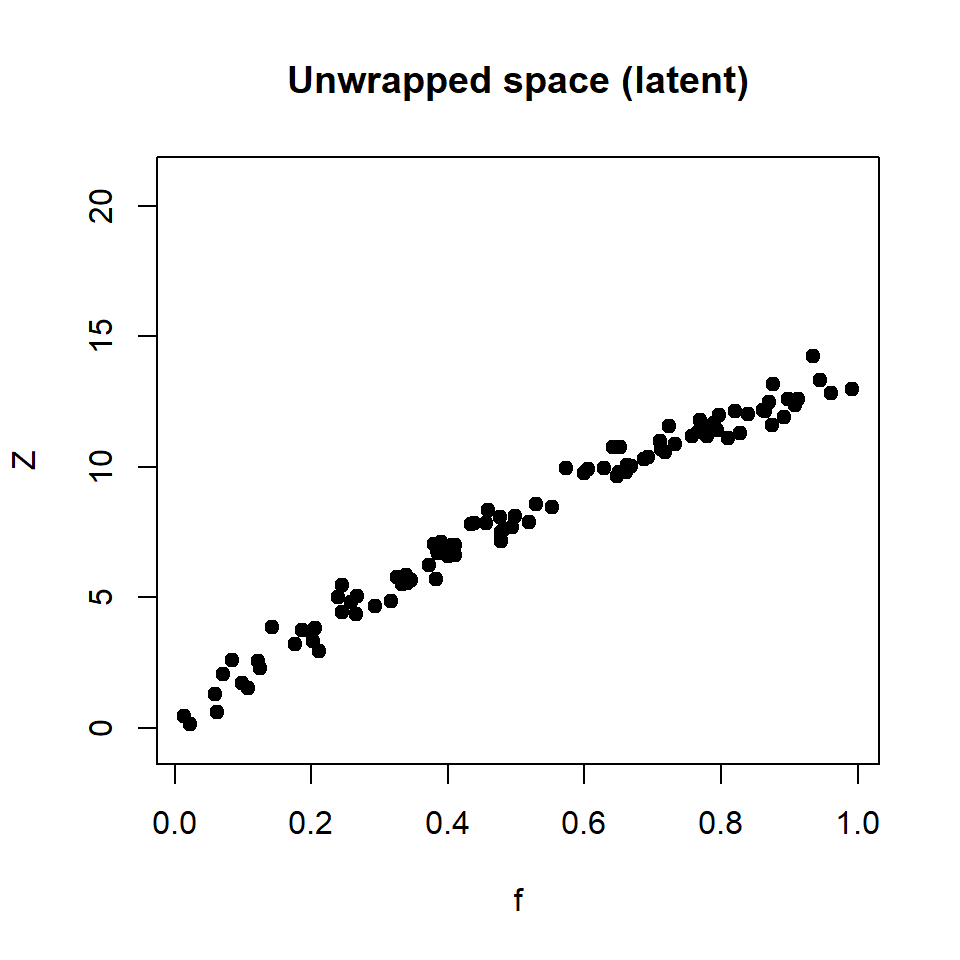
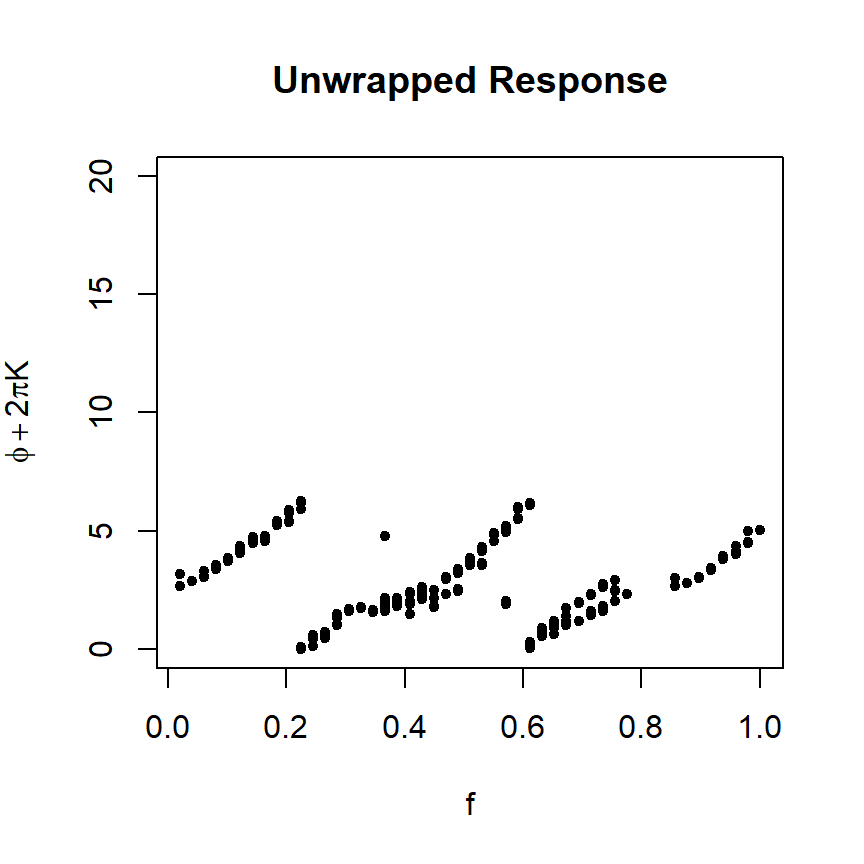
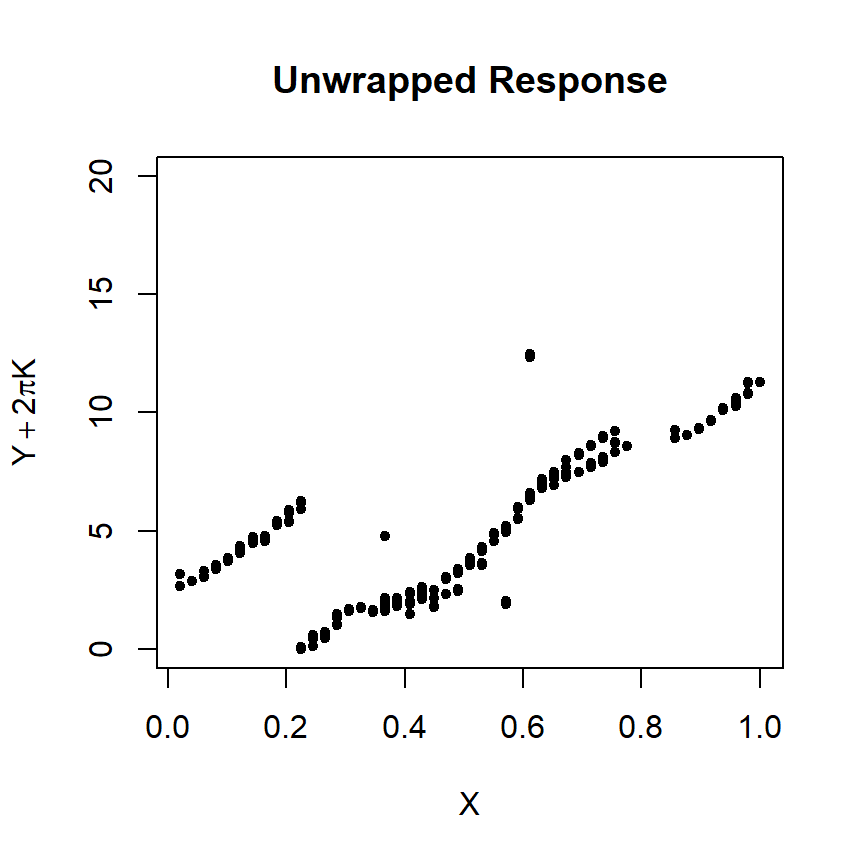
- We can think of angular observations as being a “wrapped” version of some real-valued response \(Z\).
- What if we could “unwrap” phase angle?
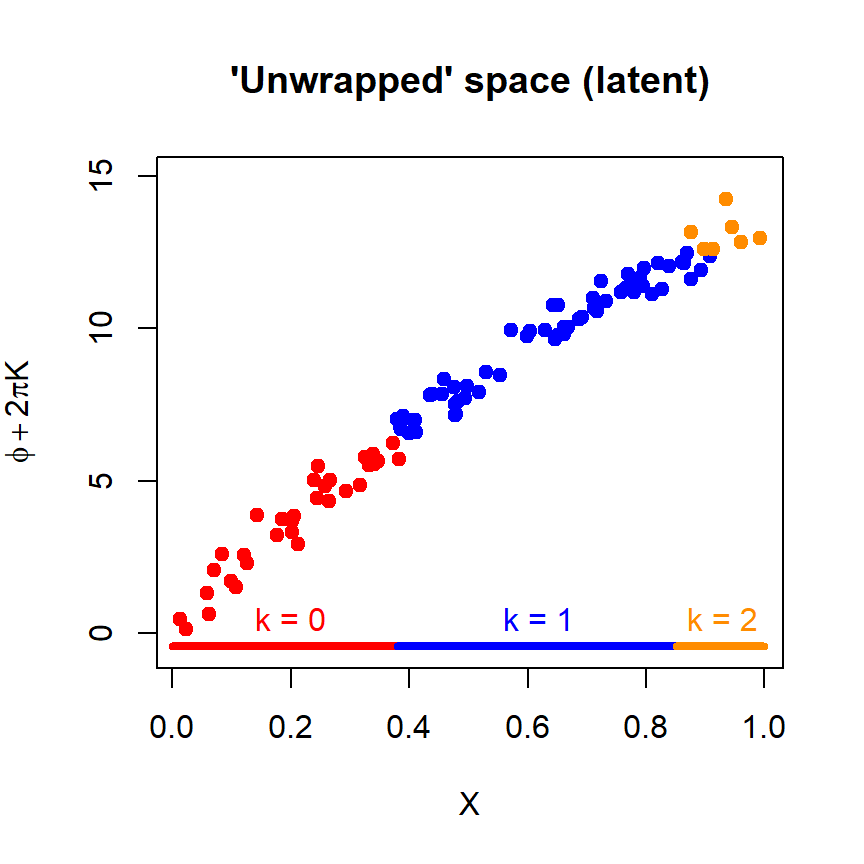
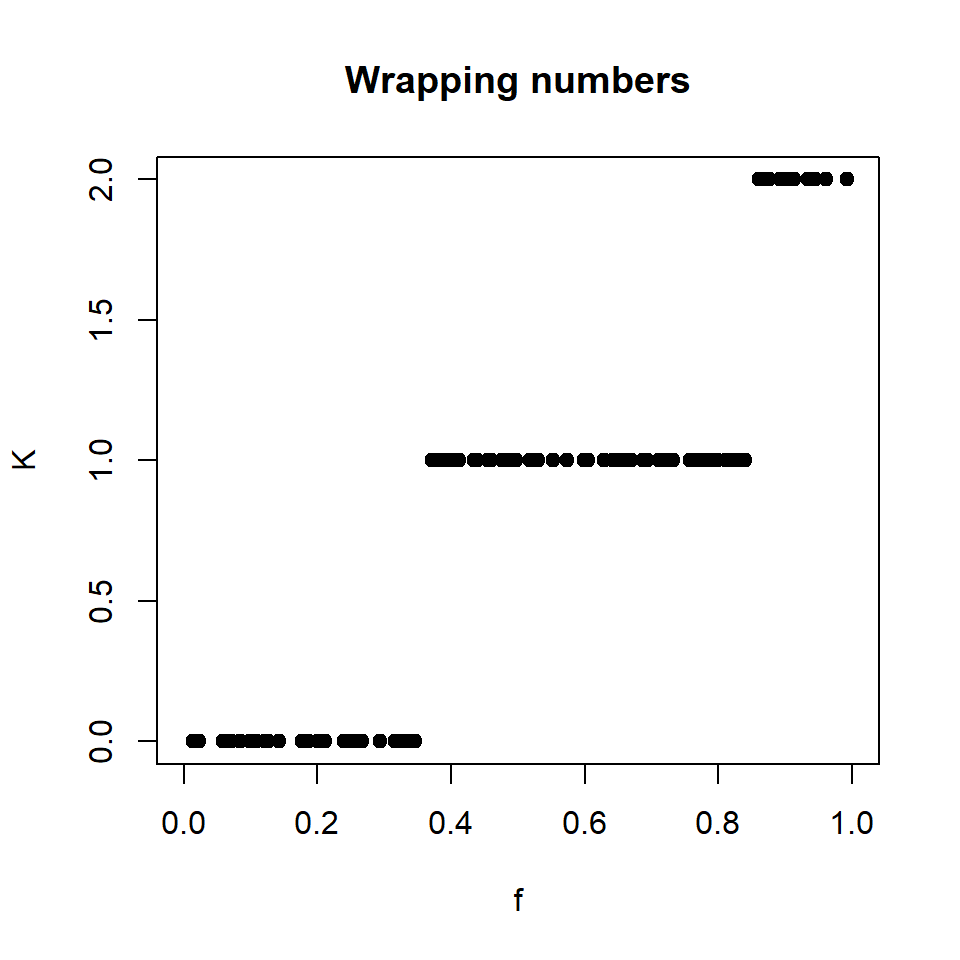
- To do this, we must know the corresponding wrapping numbers \(K\in\mathbb{Z}^n\):
\[\begin{align*} Z &= \phi + 2\pi K. \end{align*}\]
Wrapped GPs for angular regression
- Most approaches leverage \(K\) to reconstruct \(Z\) (Jona-Lasinio et al. 2012)
- However, improper estimation of \(K\) can severely impact inference of \(Z\)
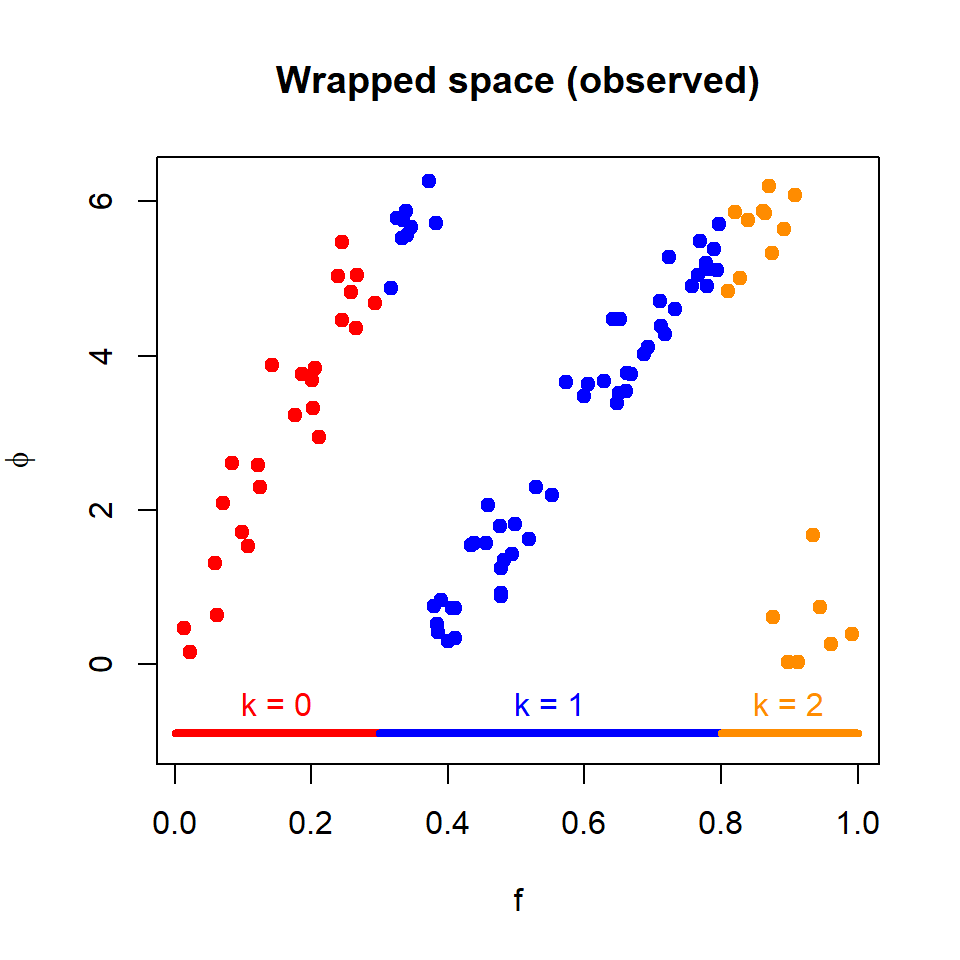
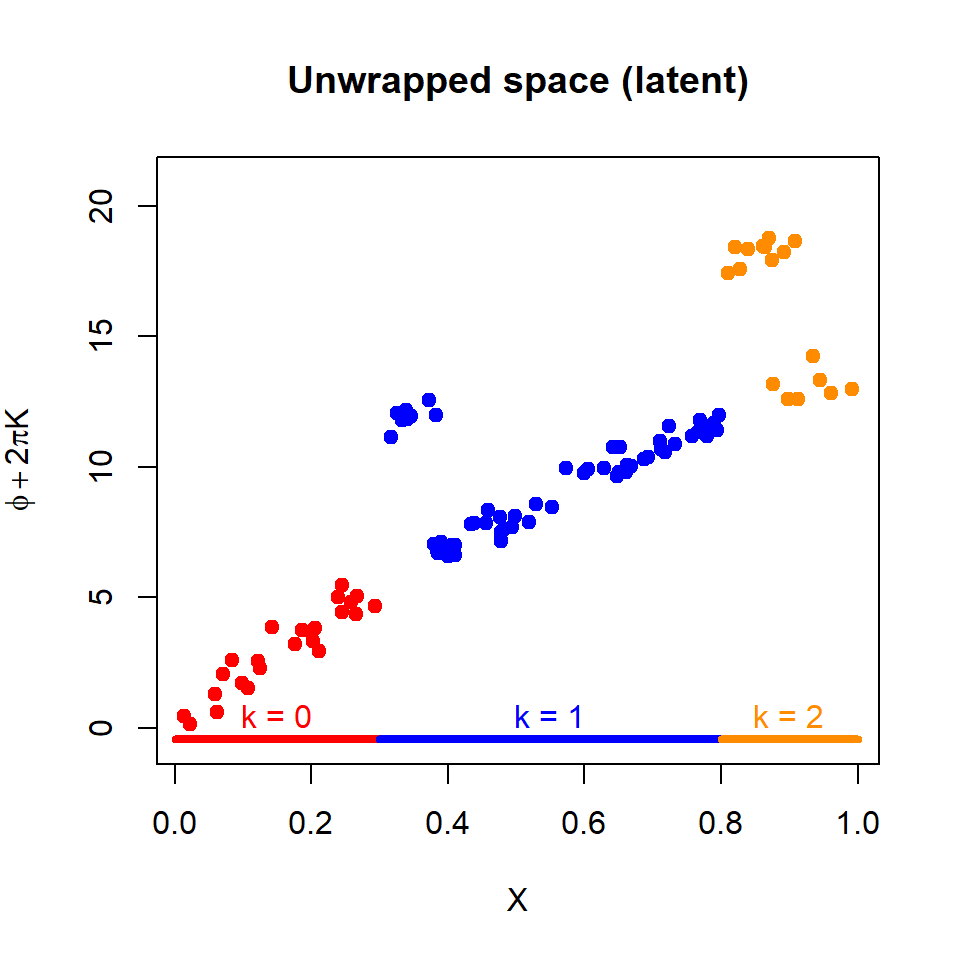
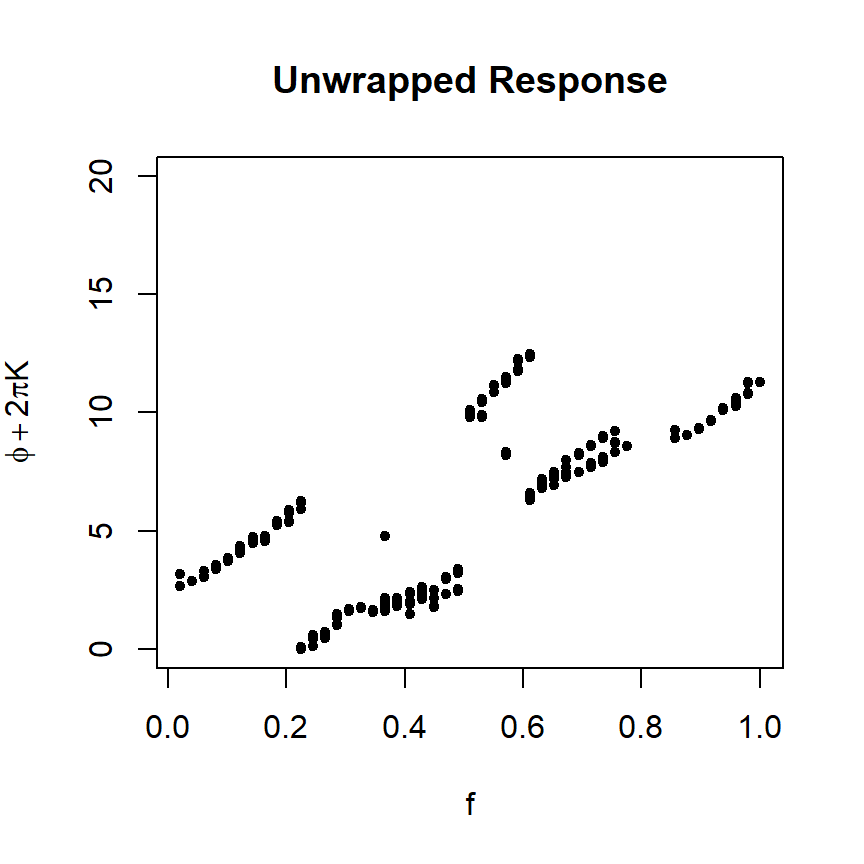
Wrapping number behavior
- Linear structure induces monotonic wrapping behavior
- If \(f_i\leq f_j\), then \(k_i\leq k_j\).
- We can infer wrapping numbers by estimating the wrapping \(\color{blue}{\text{locations}}\).
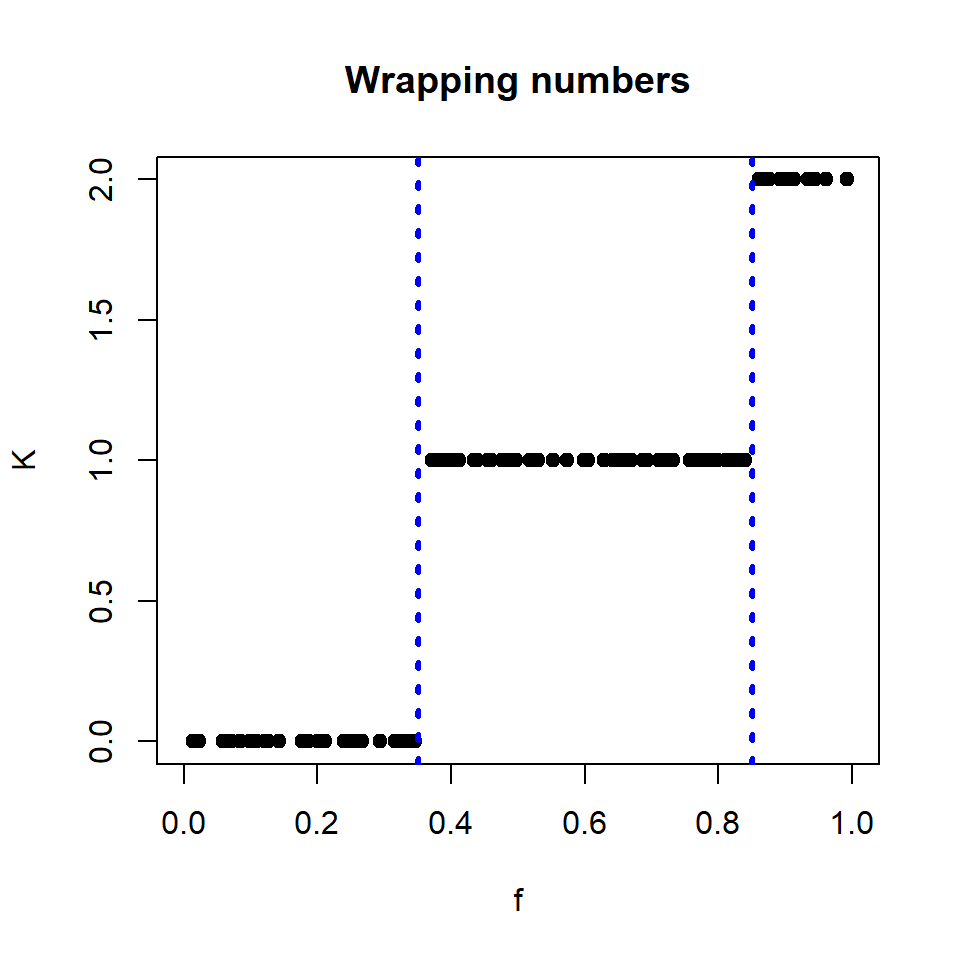
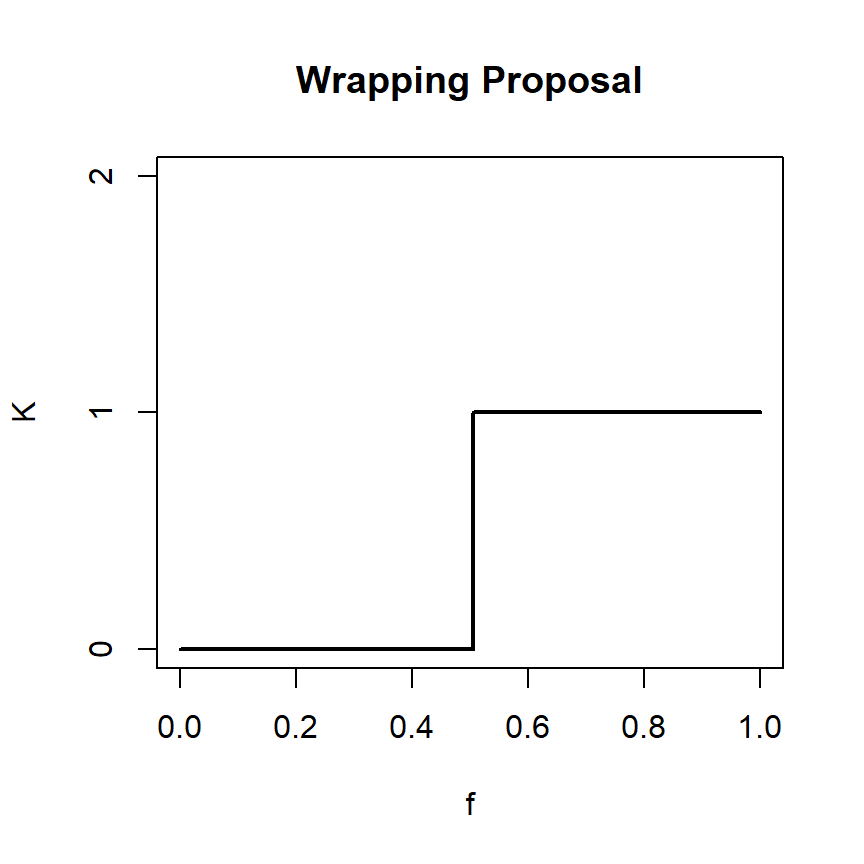
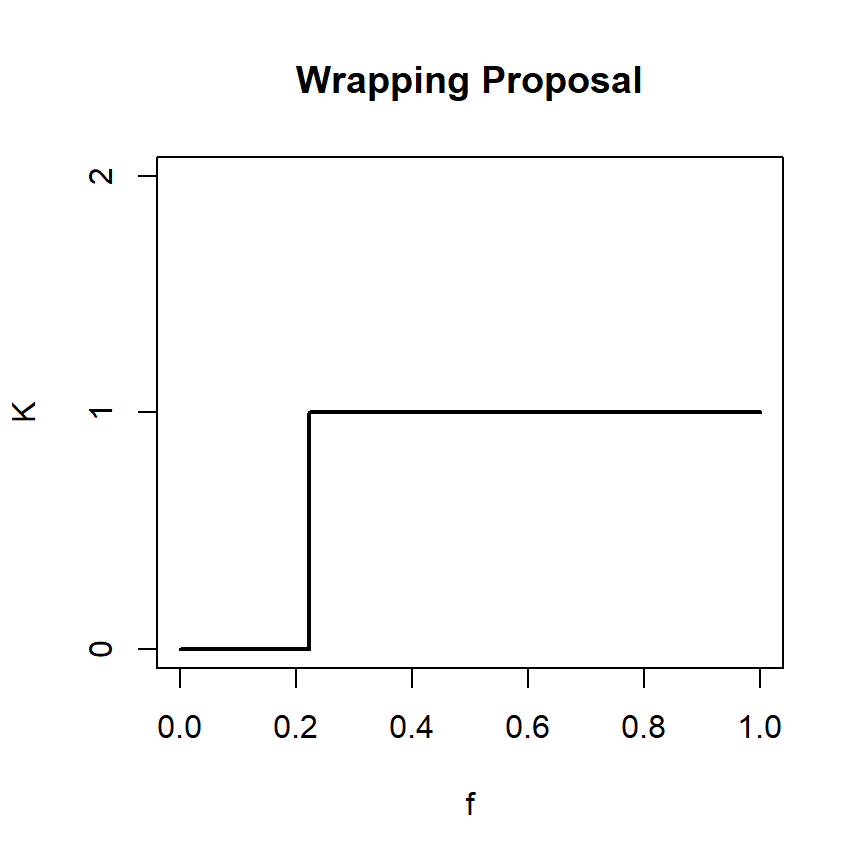
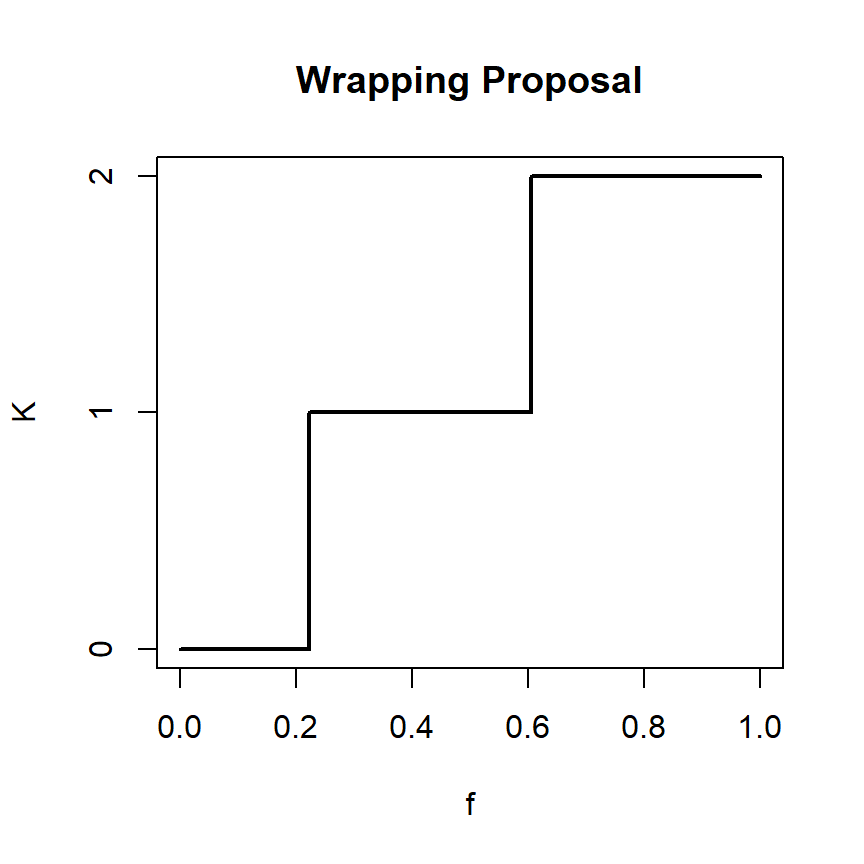
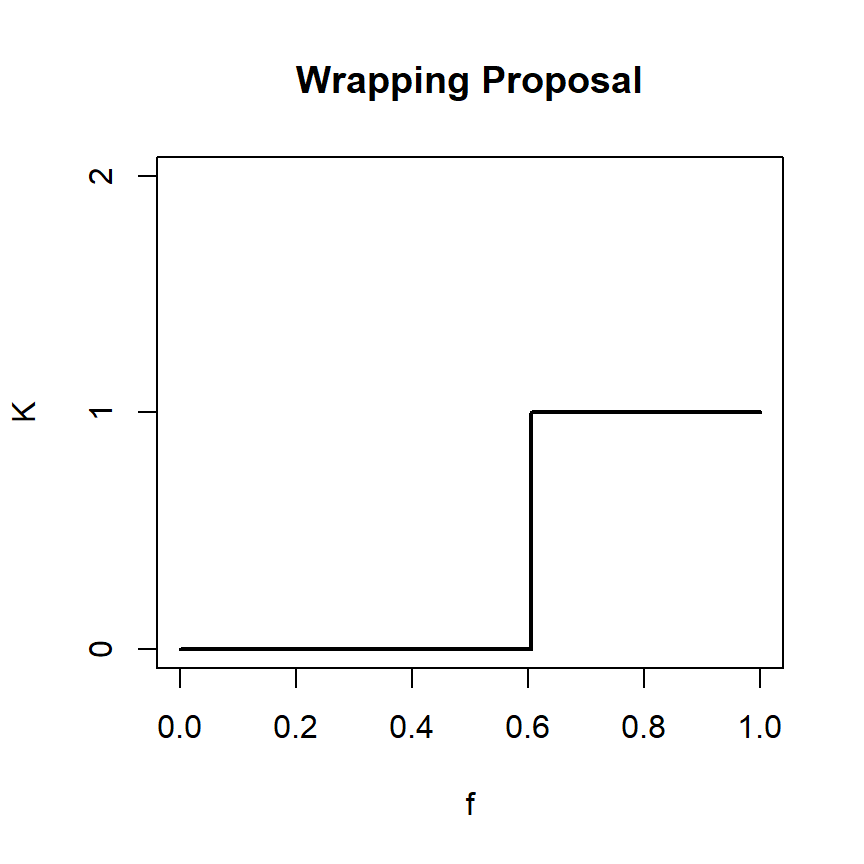
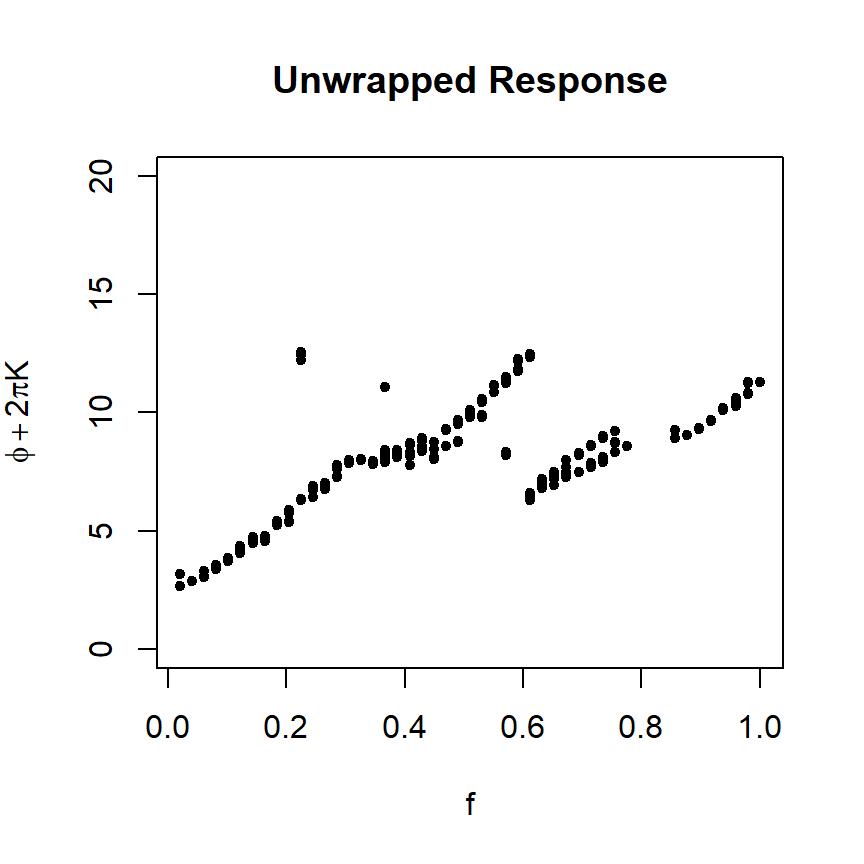
Wrapping number estimation
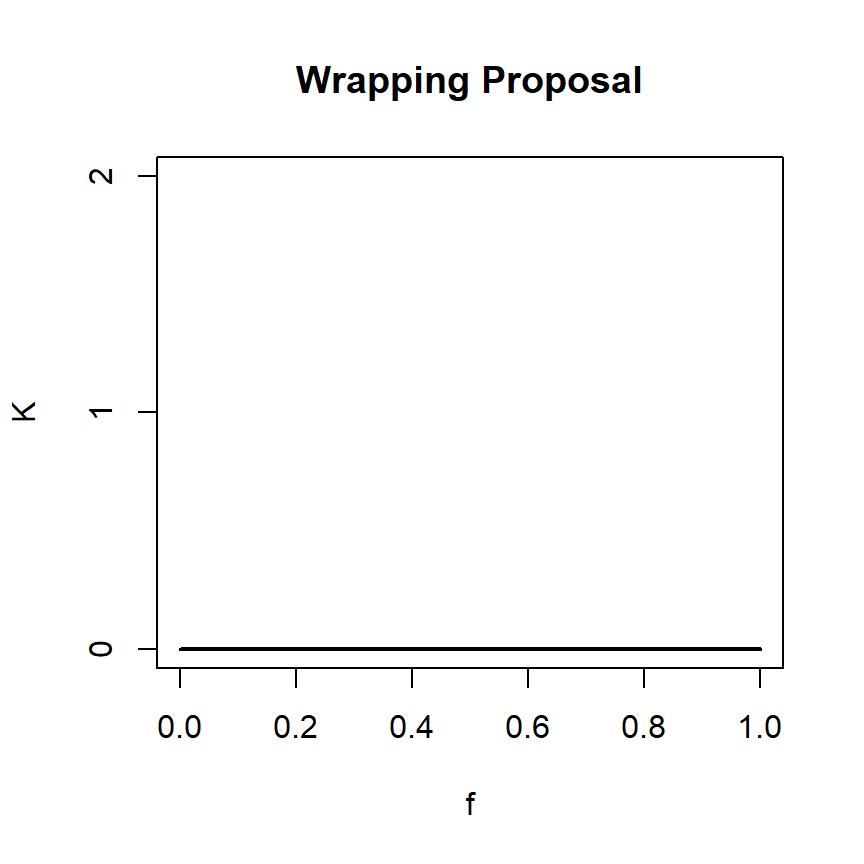
- We explore the space of wrapping numbers using three types of proposals:
- Shifting a wrapping location.
- “Growing” a new wrapping location.
- “Shrinking” a wrapping location.
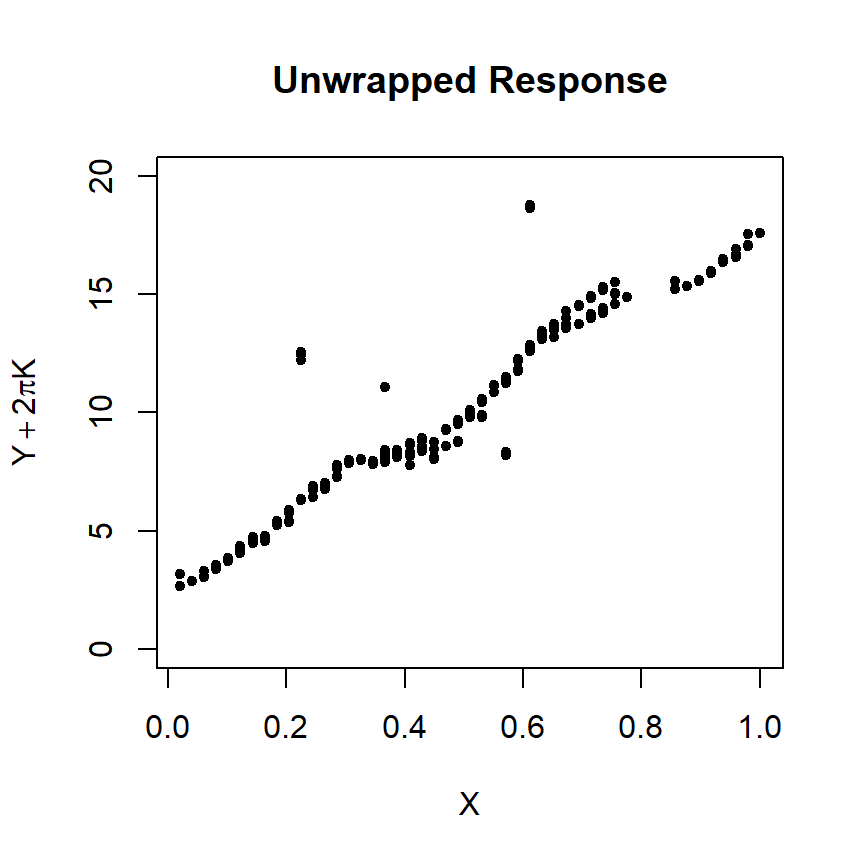
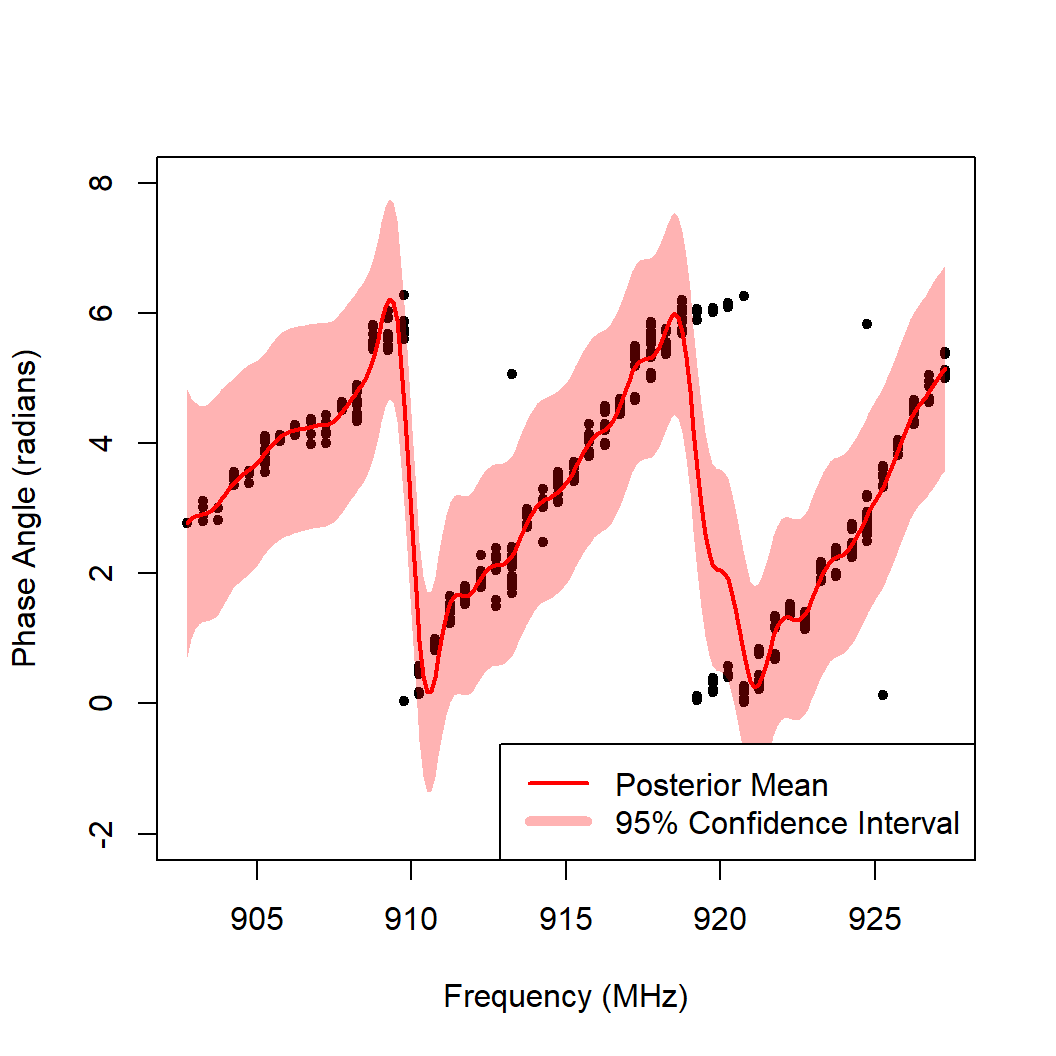
Part 4: Wrapped GPs for phase modeling
- We model phase at each distance with our wrapped Gaussian process approach (Cooper et al. 2025).
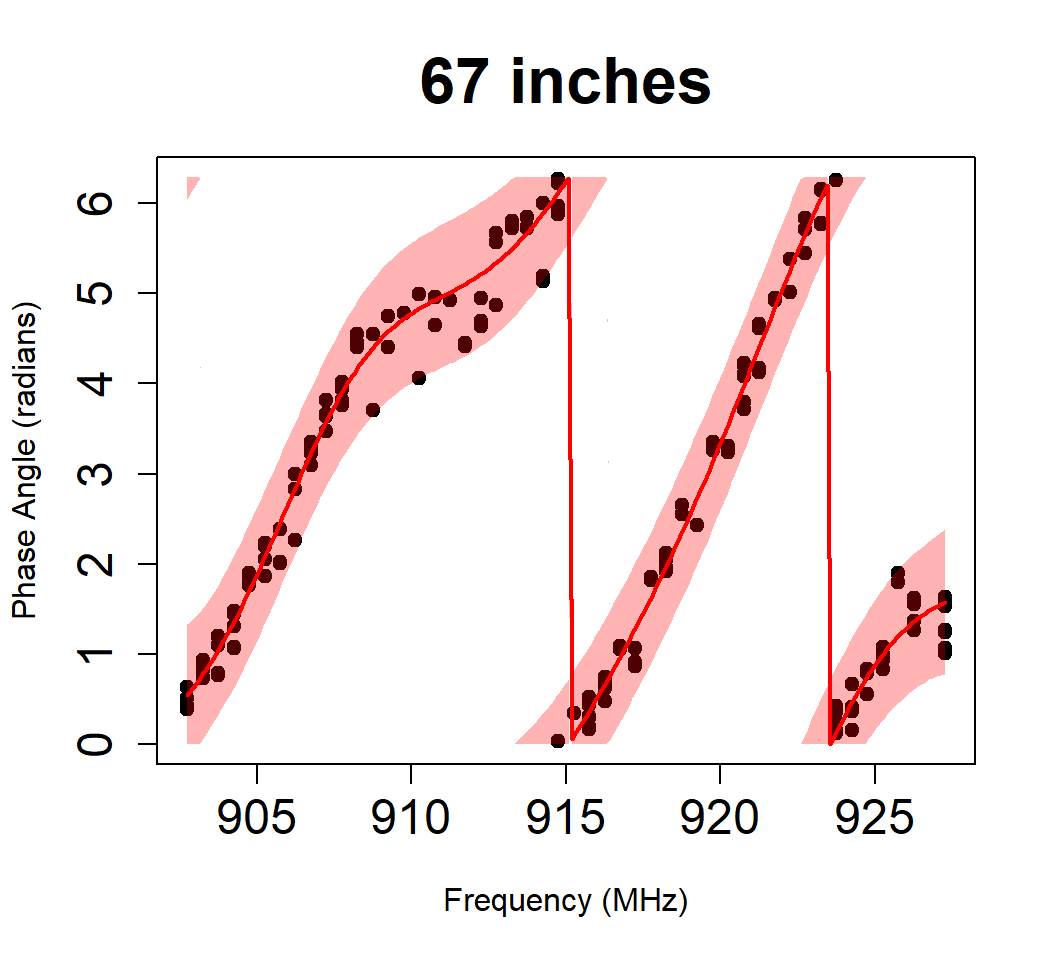
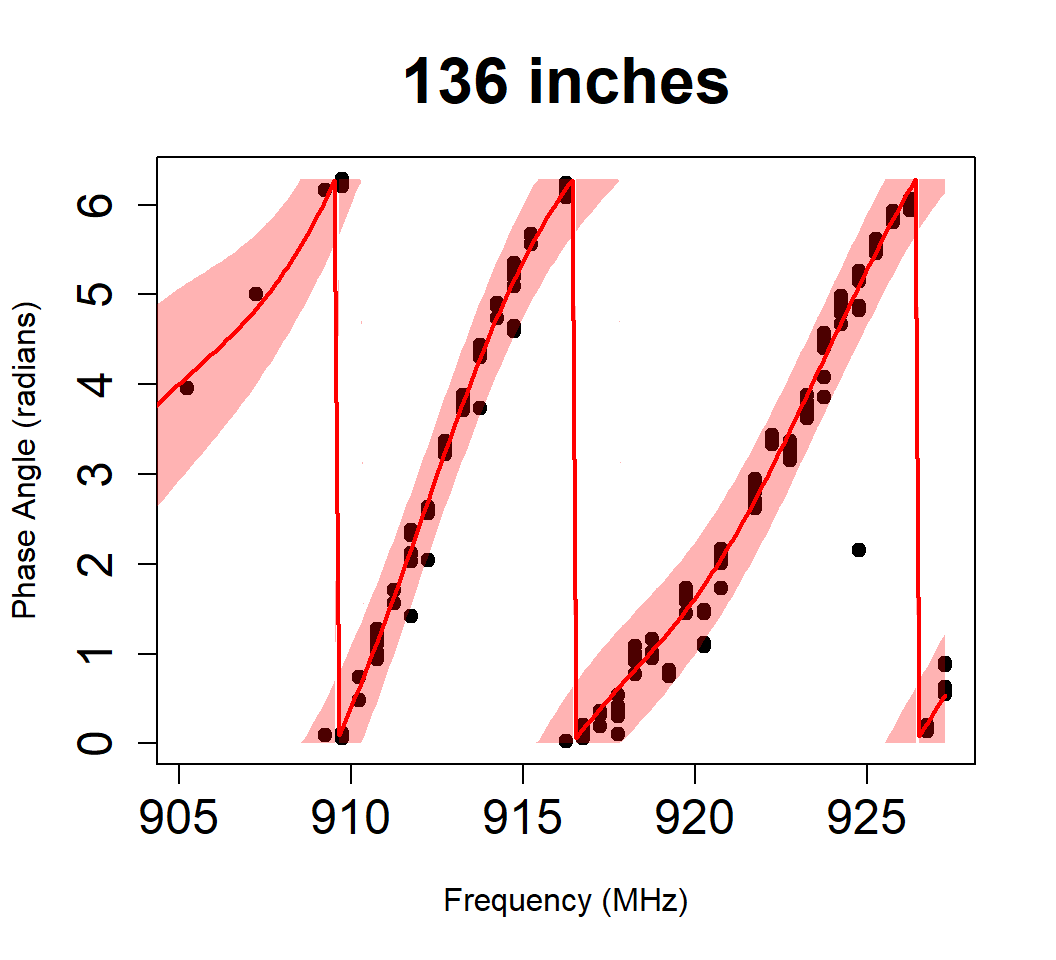
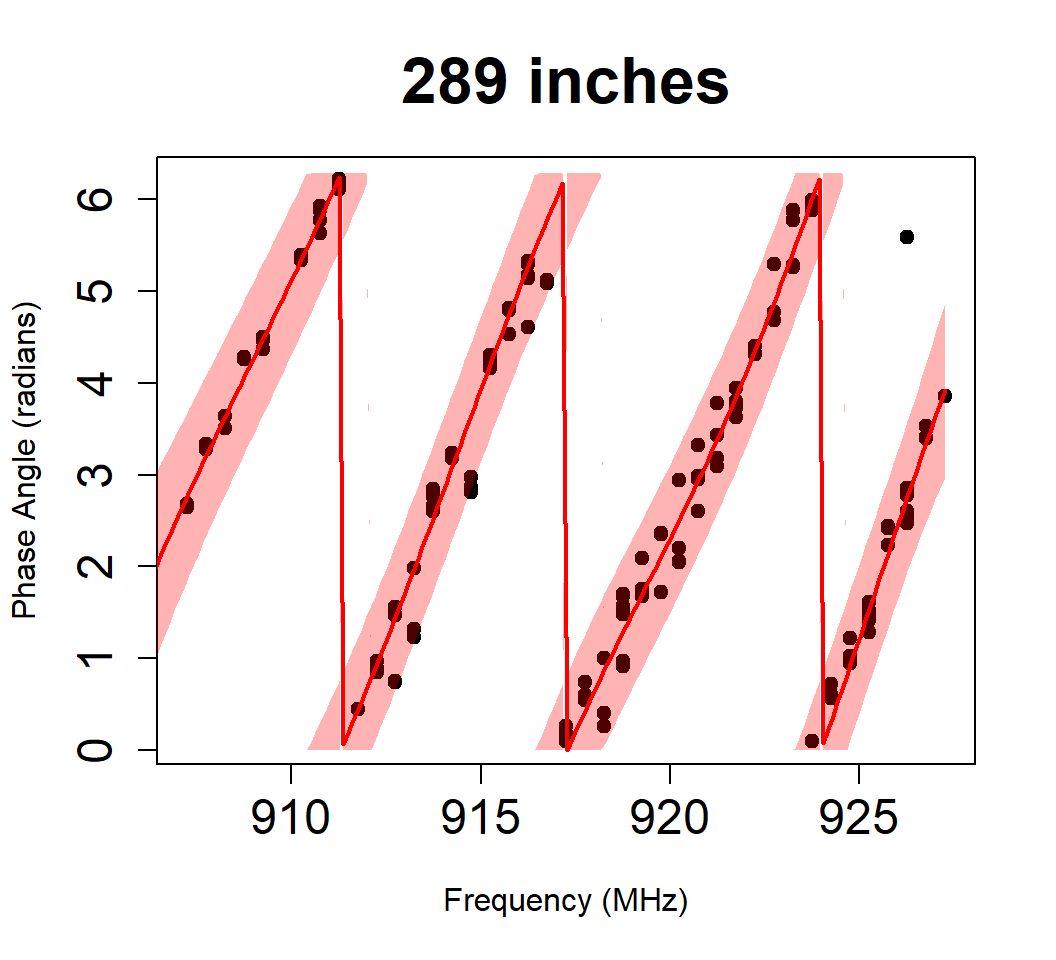


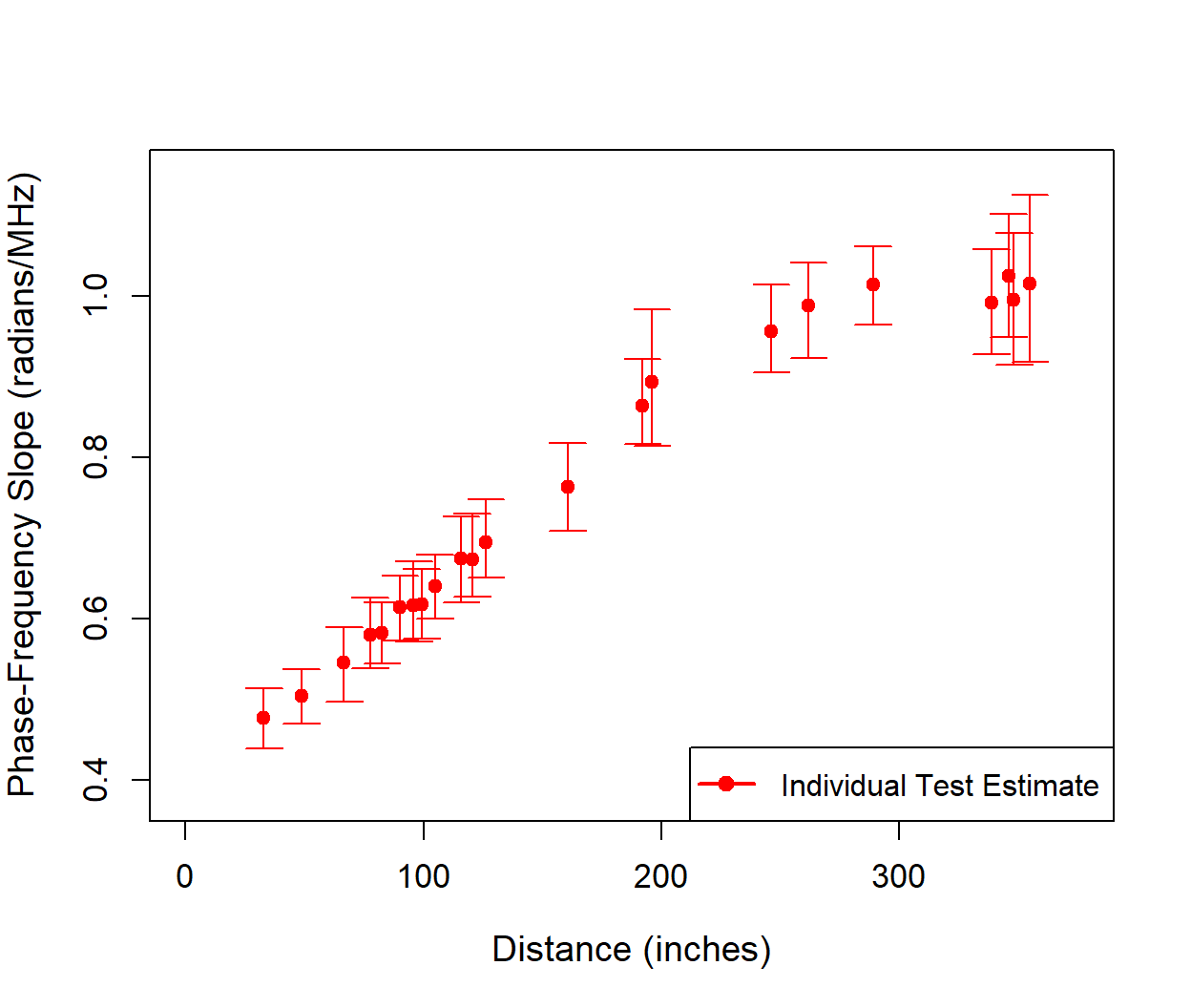
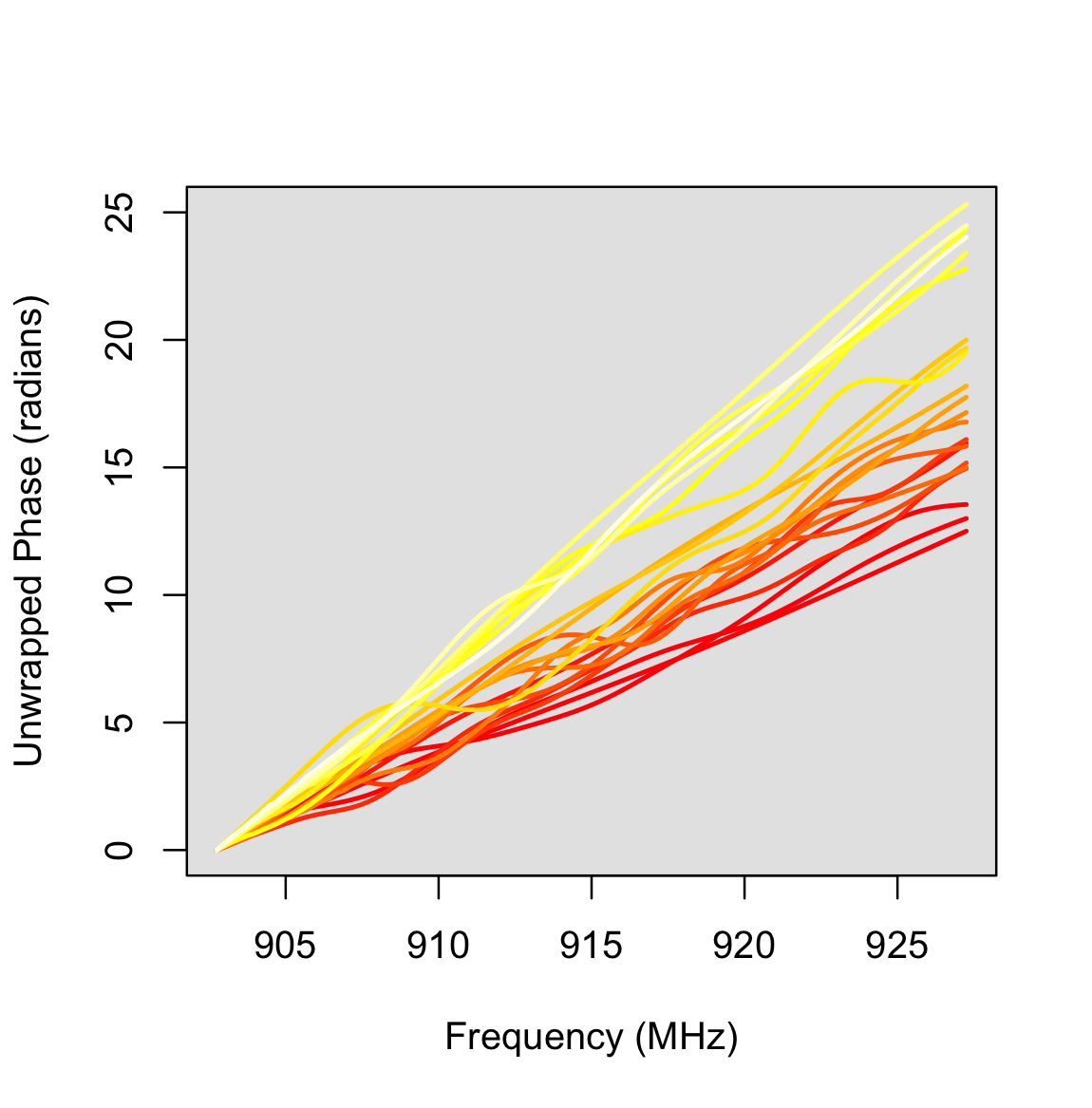
Phase-frequency slopes
- Shorter tag distances (red) have smaller estimated slopes compared to longer distances (yellow).
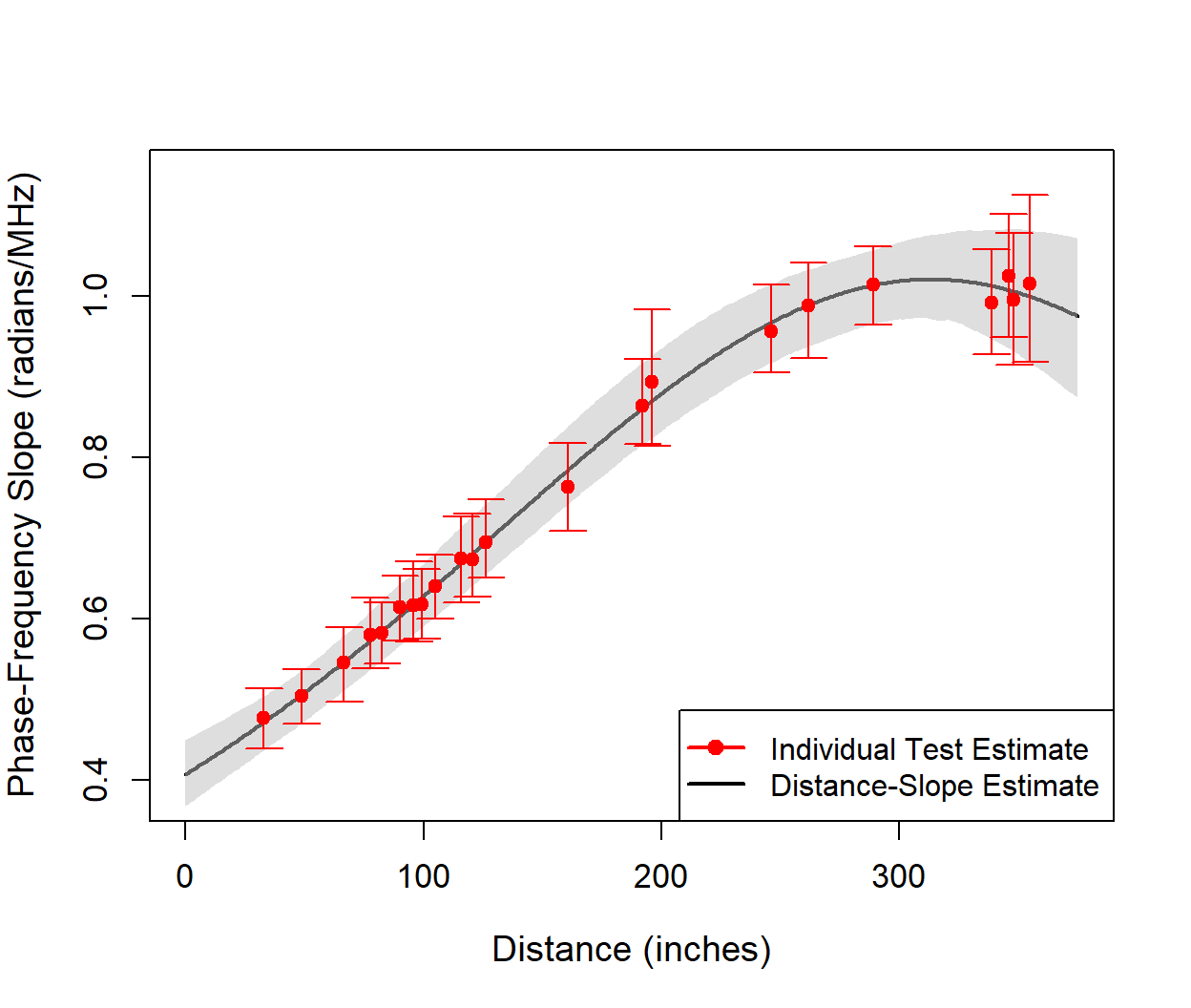
Relating phase-frequency to distance
- Wrapped GP properly captures the phase-frequency relationship \(\beta_j\) at distance \(d_j\).
- Additional hierarchical GP can capture relationship between slope and distance.